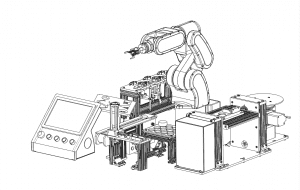
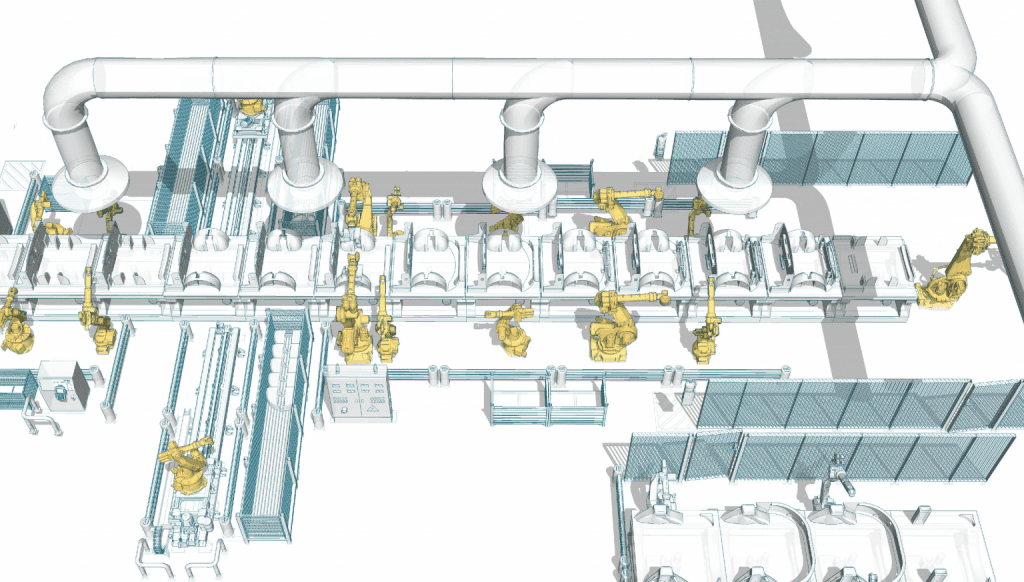
Wykorzystaj oprogramowanie do projektowania parametrycznego, aby sprosta? wymaganiom dotycz?cym pojedynczych stanowisk robotycznych i linii produkcyjnych robotów.
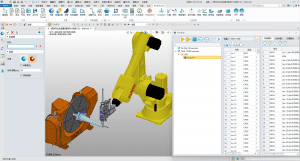
Programowanie robota offline??
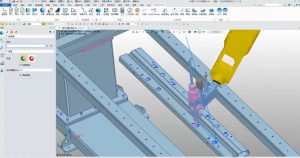
Proces programowania biurowego: Import modelu robota–>Planowanie procesu–>Symulacja procesu obróbki–>Optymalizacja systemu stacji roboczej–>Wyj?cie kodu pocztowego
Weryfikacja programowania: Obs?uga dekompilacji programu robota, która mo?e weryfikowa? i optymalizowa? programy robota
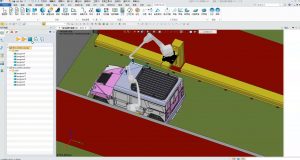
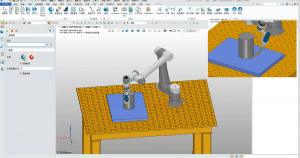
Wirtualne uruchomienie robota
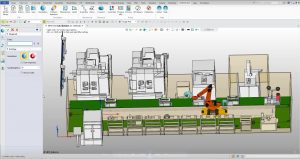
Wyposa?ony w wirtualne debugowanie i wirtualne monitorowanie, dzia?ania wirtualnej stacji roboczej systemu robota i rzeczywistej stacji roboczej systemu robota mog? by? synchronizowane;
Obs?uguje symulacj? komunikacji IO wielu maszyn, synchronizacj? wielu robotów i planowanie po??czeń wieloosiowych robotów.


試.png)

字孿生-300x170.png)