Zusammenfassung: Der Einsatz kollaborativer Roboter tr?gt dazu bei, einen Gro?teil repetitiver manueller Arbeit zu reduzieren und die Produktionseffizienz deutlich zu steigern. Grundlage verschiedener kollaborativer Roboteranwendungen ist die Roboterprogrammierung und -simulation. Mithilfe der Offline-Roboterprogrammiersoftware iRobotCAM k?nnen kollaborative Roboter wie Yuejiang schnell zur Roboterprogrammierung und virtuellen Simulation eingesetzt werden.
Mit der zunehmenden Flexibilit?t von Roboteranwendungen, insbesondere dem hohen Freiheitsgrad und der hohen Pr?zision kollaborativer Roboter, setzen Branchen wie die Luftfahrt, die Automobilindustrie und die Elektronikindustrie zunehmend kollaborative Roboter ein, um repetitive manuelle Arbeiten zu reduzieren und die Produktionseffizienz deutlich zu steigern. Die Programmierung und Simulation verschiedener kollaborativer Roboterszenarien bildet die Grundlage kollaborativer Roboteranwendungen. Dieser Artikel stellt iRobotCAM vor, eine auf einer 3D-CAD-Modellierungsplattform basierende Offline-Programmiersoftware für Roboter. Am Beispiel des kollaborativen Roboters debot wird gezeigt, wie sich mit kollaborativen Robotern von debot schnell Schwei?roboter-Programmierung und virtuelle Simulation realisieren lassen.

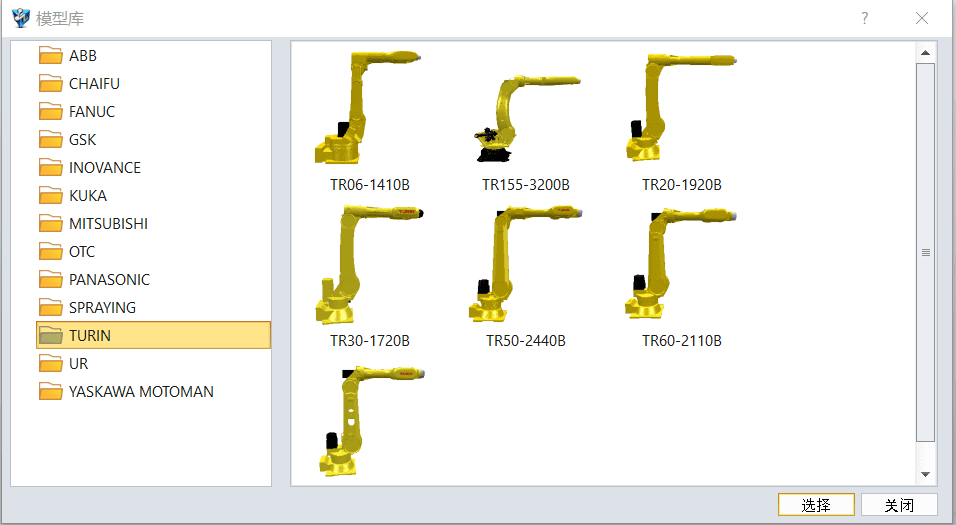
- Mit der Roboterbibliothek von iRobotCAM k?nnen Sie vorhandene Roboterbibliotheken von ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turin, UR, Yaskawa und anderen nutzen oder bei Bedarf schnell neue kollaborative Roboterbibliotheken wie debot Robotics erstellen. Die Bibliothek l?sst sich durch einfache gemeinsame Definitionen erstellen.
2. Nutzen Sie die praktische Lehrfunktion von iRobotCAM, um die Lehrprogrammierung durch einfaches Ziehen und Ablegen zu erreichen

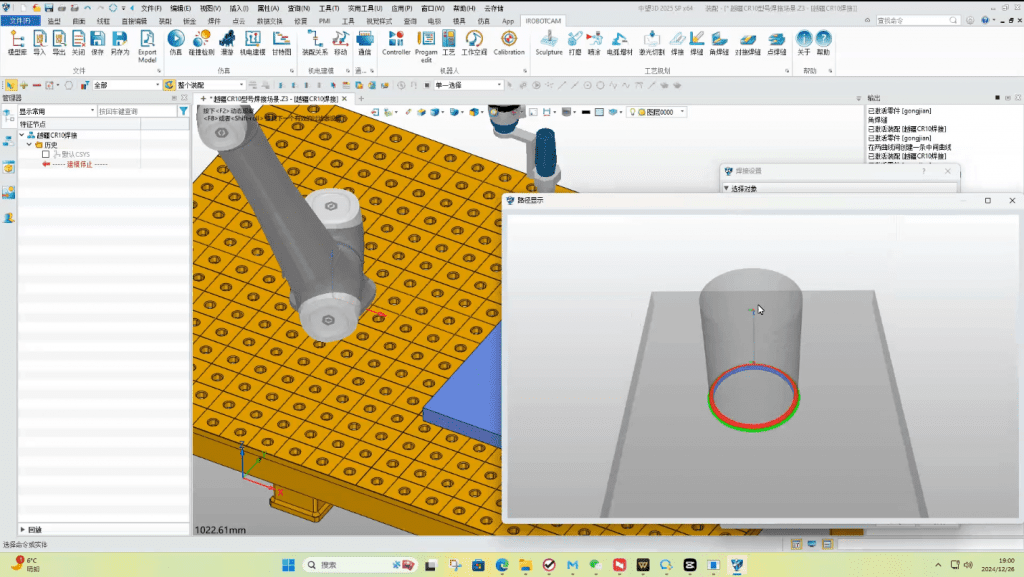
3. Mit dem Schwei?modul k?nnen Sie schnell die Schwei?position markieren und Schwei?funktionsprogramme erstellen.

4. Mit den umfangreichen Zwei- bis Fünfachsen-Trajektorienfunktionen von iRobotCAM k?nnen Sie schnell Schwei?programmiertrajektorien erstellen und die Trajektorien simulieren.

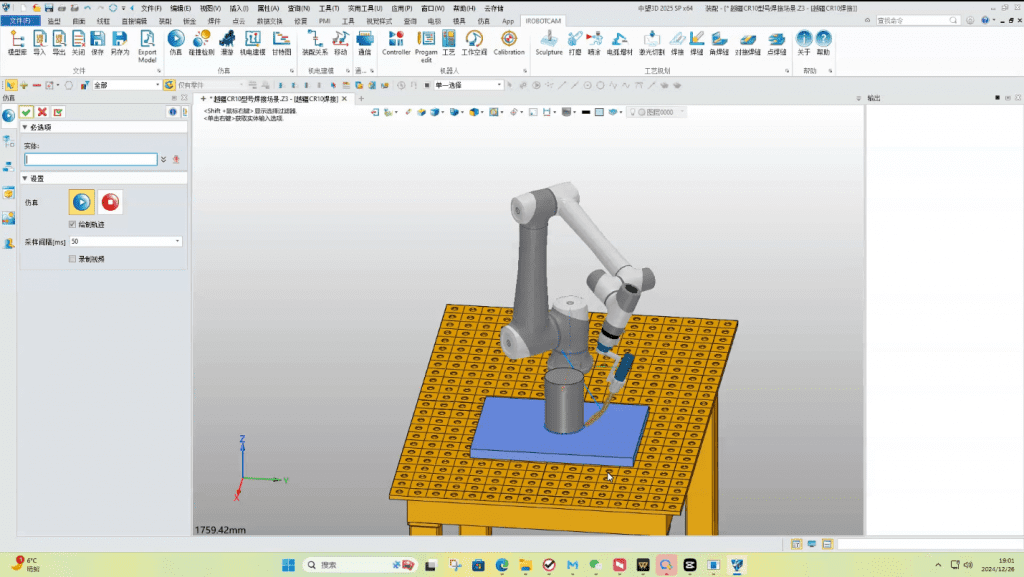
5 Mithilfe des Robotersimulationsverarbeitungseffekts von iRobotCAM kann der Roboterschwei?effekt weiter überprüft und simuliert werden.
6. Für Roboteranwendungsszenarien kann iRobotCAM verwendet werden, um die gesamte Schwei?szene des Roboters zu simulieren und den Schwei?prozess intuitiv anzuzeigen.
Das folgende Video zeigt die Programmierung und Simulation des Schwei?ens mit dem kollaborativen Roboter Debot.
über Yueqing Technology
Yueqing Technology hat sich zum Ziel gesetzt, eine offene Offline-Programmierplattform für iRobotCAM-Roboter zu entwickeln. Dabei handelt es sich um eine digitale L?sung, die die elektromechanische Konzeption von Produktionslinien, die Simulation der Roboterverarbeitungsprogrammierung und virtuelles Debugging integriert.
iRobotCAM-Website: www.euromedic-care.com; Kontakt: cooperation@iRobotCAM.com