Resumo: Perante o problema do elevado limite e do elevado custo da plataforma de treino e modela??o de rob?s, a Yueqing Technology aproveita as suas próprias vantagens tecnológicas da indústria em software de rob?s para lan?ar o módulo de modela??o de rob?s baseado no kernel de geometria 3D, expandir a interface URDF e abrir a simula??o e análise de rob?s ROS.
Face ao problema do elevado limite e do elevado custo da plataforma de treino e modela??o de rob?s, a Yueqing Technology aproveitou as suas vantagens técnicas do setor em software de rob?s para lan?ar o módulo de modela??o de rob?s iRobotCAM baseado na plataforma de kernel de geometria 3D.
- Com as capacidades de modela??o do iRobotCAM e as capacidades do motor de física desenvolvido por si, o iRobotCAM pode criar e gerir rapidamente modelos de rob?s e conduzir simula??es físicas.
- Com as interfaces de importa??o e exporta??o URDF estendidas, o iRobotCAM liga-se ainda mais com os rob?s ROS, permitindo aos utilizadores ligar a modela??o e a simula??o de rob?s para treinar o modelo físico dos rob?s de forma mais eficaz.
De seguida, tomamos como exemplo o rob? industrial mais simples para elaborar mais sobre como utilizar o iRobotCAM para realizar a modela??o e treino de rob?s:
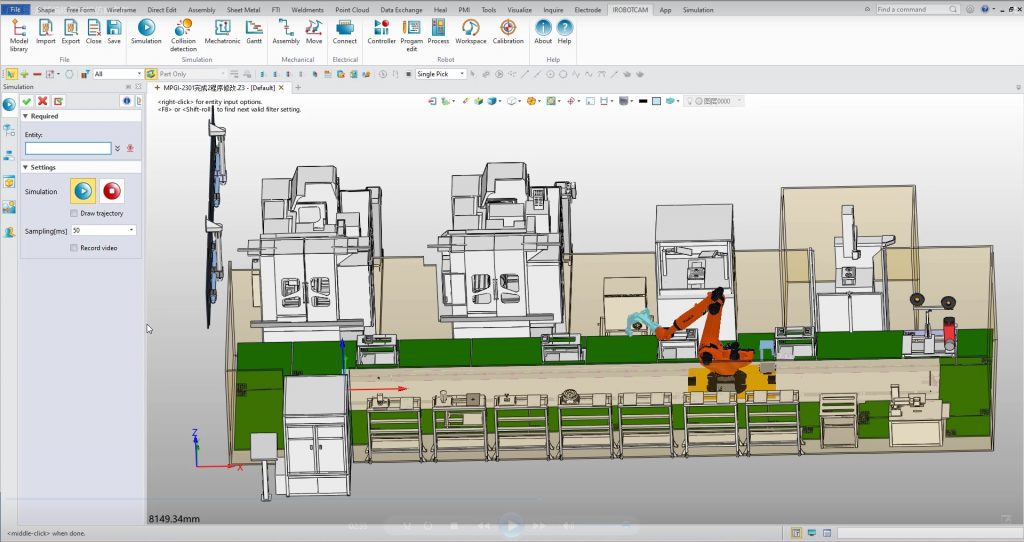
- Modela??o digital de cenas 3D
- Utilizando a fun??o de modela??o 3D, o iRobotCAM pode construir modelos 3D complexos e completar a modela??o de cenas digitais.
- Suporte à importa??o de formatos iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid e outros formatos 3D, para reutilizar os modelos 3D existentes e melhorar a eficiência da constru??o de cenas digitais de rob?s.
- Biblioteca de Design Mecatrónico e Robótica
- Estabelecimento de um ambiente de dados de sensores: suporte de sistemas de sinal PLC, incluindo Siemens, Mitsubishi, Inovance e outras marcas, e suporte à personaliza??o de mais dispositivos de acesso a sinal
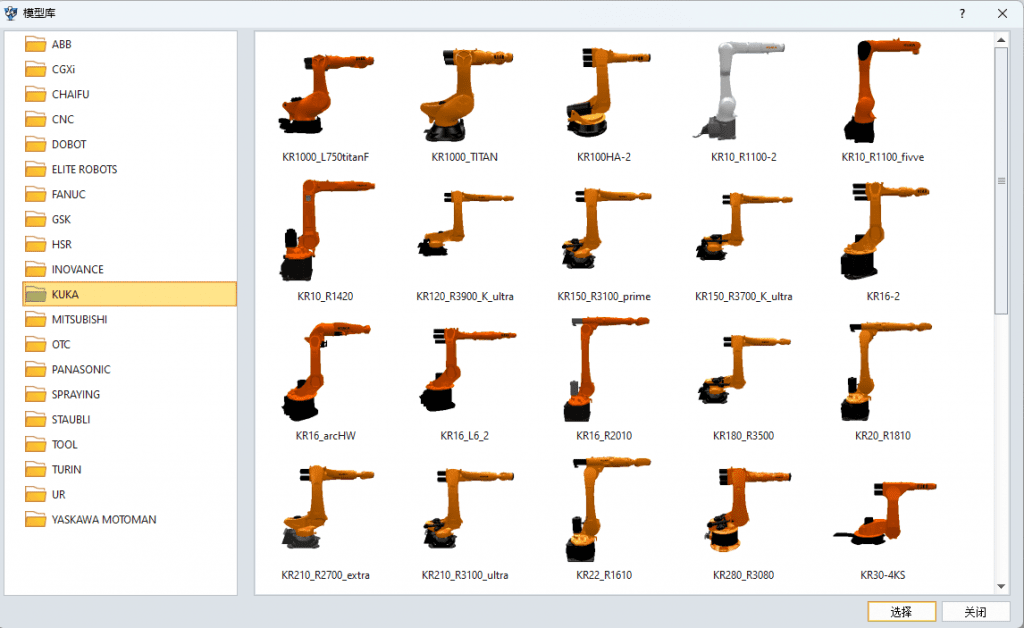
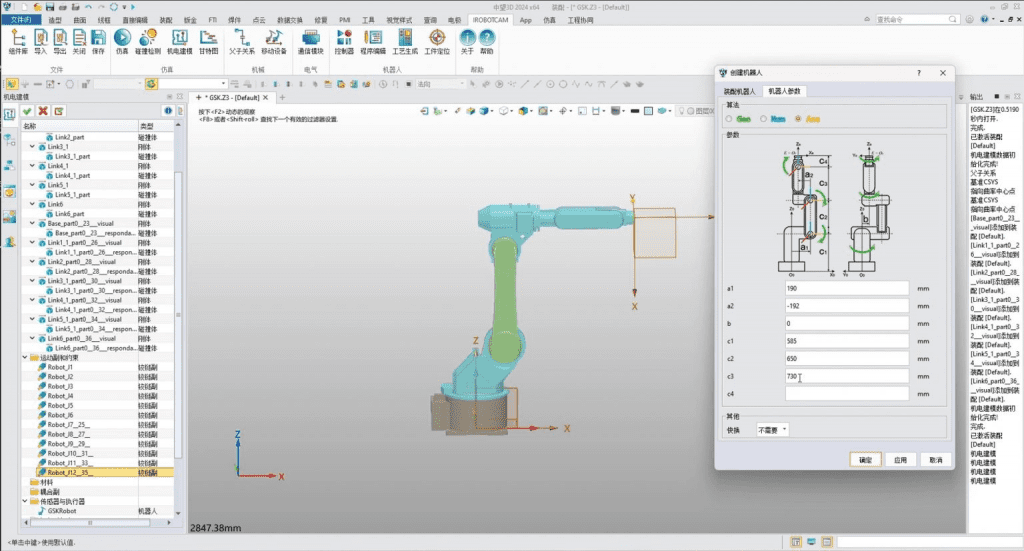
- Estabelecimento de bibliotecas de rob?s: Para rob?s industriais, pode utilizar bibliotecas de rob?s incorporadas, incluindo ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO e Turing para estabelecer modelos de simula??o de rob?s ou estabelecer a sua própria biblioteca de rob?s através de fun??es de personaliza??o de rob?s. Para os rob?s humanoides ou com rodas, a informa??o detalhada das juntas das pe?as correspondentes pode ser estabelecida conforme necessário, e a defini??o geral da junta, a dete??o de colis?es, etc., podem ser formadas para formar uma biblioteca completa de rob?s humanoides ou com rodas específicos.
- Treino de rob?s
- Estabelecimento do modelo de planeamento de trajetória do rob?: suporte à simula??o de comunica??o IO multimáquina, sincroniza??o multirrob? e planeamento de liga??o multieixo do rob?;
- Treino de modelos físicos treinados por rob?s: Suporta a simula??o de características físicas utilizando o seu próprio motor de física, incluindo requisitos de preven??o de obstáculos, análise de colis?es e outros modelos de dados, e suporta a expans?o de interfaces de terceiros para suportar os algoritmos de treino de rob?s em cenários específicos.
- Acoplamento de dados com rob?s ROS para obter depura??o conjunta
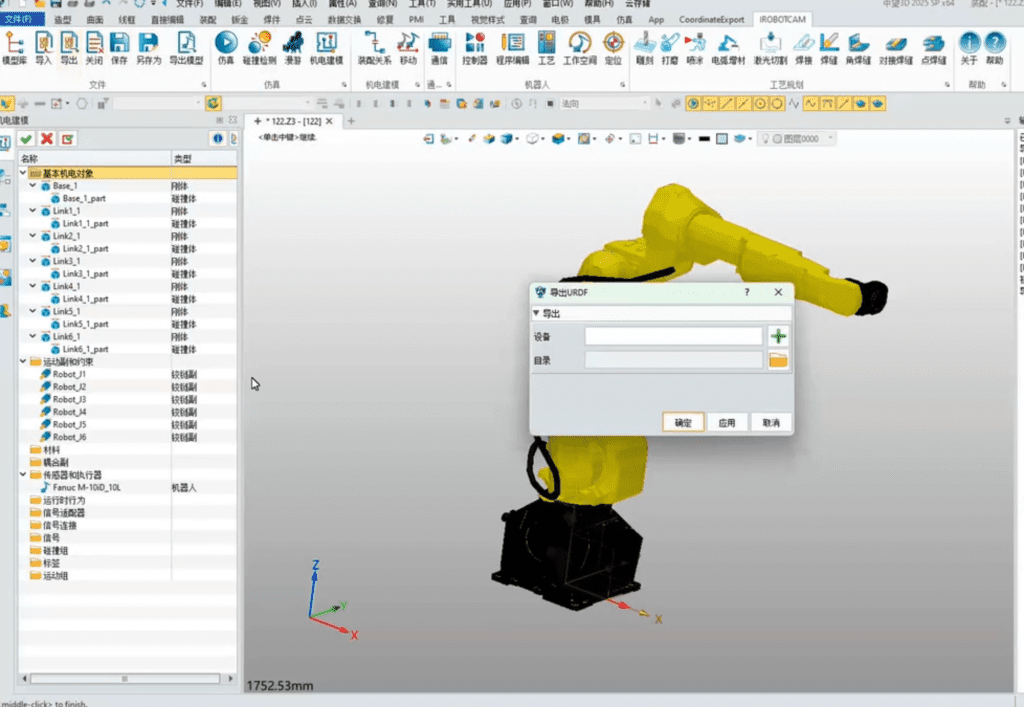
- O modelo de otimiza??o do rob? concluído pelo iRobotCAM pode ser exportado para URDF para simula??o e execu??o adicionais dos rob?s ROS
- Com a fun??o de importa??o do URDF, o modelo base do rob? pode ser importado para o iRobotCAM, e o ambiente de dados do rob? pode ser modificado e treinado no iRobotCAM para satisfazer os objetivos de design do modelo de dados do rob?.
Sobre a Yueqing Technology
A Yueqing Technology está empenhada em construir uma plataforma aberta de programa??o offline de rob?s iRobotCAM, que é uma solu??o digital que integra o design conceptual eletromecanico de linhas de produ??o, a simula??o de programa??o de processamento de rob?s e a depura??o virtual.
Site da iRobotCAM: www.euromedic-care.com; Contacto: cooperation@iRobotCAM.com