Abstrakt: Wuhan Needs Intelligence dosáhla spolupráce s Nanjing Yueqing Technology za ú?elem realizace prototypu digitálního dvoj?ete robota, demonstrování korelace mezi u?ením robota a programováním aplikací robota a intuitivní demonstrací aplika?ních scéná?? robota.
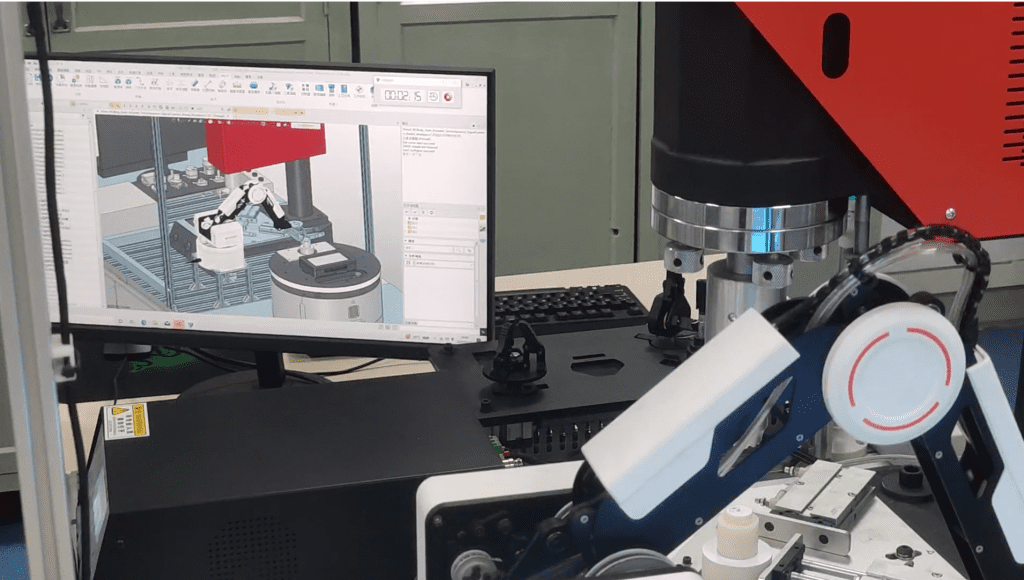
Spole?nost Wuhan Needs Intelligence dosáhla spolupráce s technologií Nanjing Yueqing, aby realizovala digitální dvoj?ata fyzického světa a virtuálního světa pro scéná?e aplikací robot?, realizovala offline programovací software pro roboty iRobotCAM a PLC komunikaci robot?, které pot?ebují inteligenci, p?esné ?ízení pohyb? kloub? atd., pomocí digitálního Dvojity aplika?ní model ukazuje korelaci mezi vyukou robota a scéná?em aplikace robota a intuitivně zobrazuje roboty aplikace.
Pro aplikaci digitálních dvoj?at v sou?asné době existují v pr?myslu dvě r?zné technické cesty.
Cesta virtuální reality, která se zamě?uje na efekty simulace, obecně vyu?ívá herní enginy, jako je Unity, jako základní technologii a dále se vyvíjí na základě pr?myslovych charakteristik, aby bylo mo?né p?izp?sobit po?adované efekty simula?ní aplikace.
Na základě fyzického modelování, vytvo?ením mostu mezi fyzickym světem a virtuálním světem, je realizována interakce mezi realitou a virtualitou a je realizováno skute?né digitální dvoj?e.
Pokud jde o aplikaci technologií, svět digitálního dvoj?ete vytvo?eny modelováním fyzického světa ?asto vy?aduje více investic do vyzkumu a vyvoje tvá?í v tvá? diskrétním abstraktním model?m klí?ovych prvk? fyzického reálného světa. Av?ak pro pr?myslové aplikace má tato architektura skute?ného digitálního dvoj?ete vy??í hodnotu. Doká?e efektivně prezentovat slo?ité fyzické scény ve virtuálním světě a m??e také dále ?ídit změny ve fyzickém světě prost?ednictvím dal?ího virtuálního ladění robot?.
Pro aplika?ní oblasti pr?myslovych robot?, pokud jde o technicky vyběr softwaru pro offline programování robot? iRobotCAM, je vyběr iRobotCAM zalo?en na datech CAD, aby se dosáhlo interoperability mezi fyzickym světem a virtuálním světem a realizovaly se aplikace skute?ného digitálního dvoj?ete. Jak konkrétně software pro offline programování pr?myslovych robot? iRobotCAM realizuje konstrukci praktického virtuálního programovacího prost?edí iRobotCAM?
- Simulace montá?e motoru, v?etně robot?, rychlovyměnnych za?ízení, dopravníkovych linek a r?znych senzor?
- Virtuální a skute?ná synchronní simulace, shroma??ování dat z vyrobní linky a mapování dat ovlada?e pohybu a PLC dat do simula?ního systému
- Podporuje simulaci systému v?etně dopravníkovych linek, více robot? a materiálovych systém?. Podporuje systémové simulace v?etně dopravníkovych linek, více robot? a materiálovych systém?.
Rychlou tvorbou aplika?ních scéná?? a p?ipojením k odpovídajícím komunika?ním modul?m m??e iRobotCAM realizovat virtuální ladění robota a aplika?ní scéná?e digitálního dvoj?ete.
O iRobotCAM :
Technologie Yueqing se věnuje vyvoji ?e?ení typu v?e v jednom pro návrh vyrobní linky, offline programování robot? a virtuální ladění.
Webové stránky iRobotCAM: www.euromedic-care.com,E-mail: cooperation@iRobotCAM.com