要約:武漢ニーズインテリジェンスは、南京楽清科技と提攜して、ロボットのデジタルツインプロトタイプを?qū)g現(xiàn)し、ロボットの指導(dǎo)とロボットアプリケーションプログラミングの相関関係を?qū)g証し、ロボットのアプリケーションシナリオを直感的に実証しました。
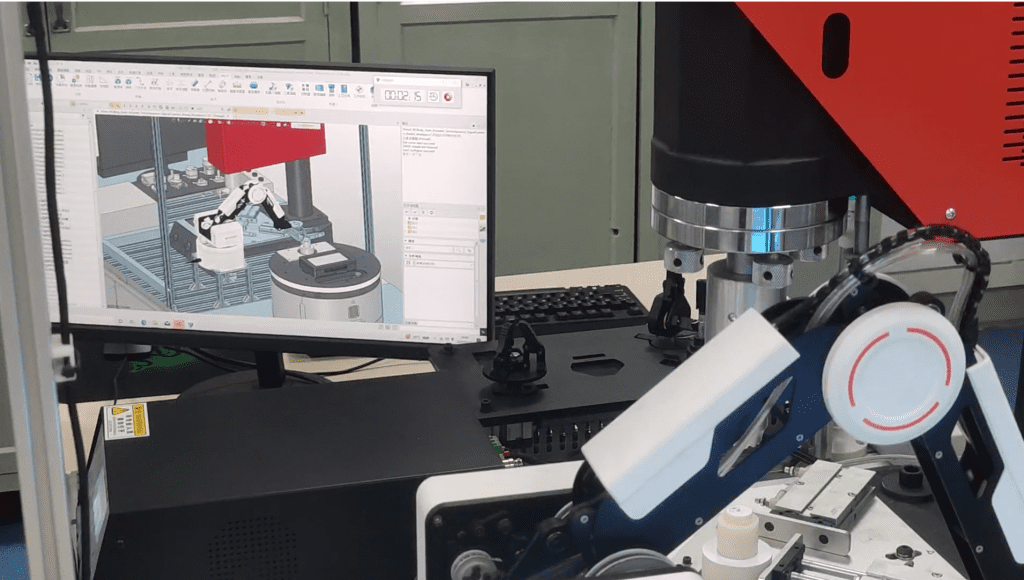
武漢ニーズインテリジェンスは、南京楽青科技と提攜して、ロボットの応用シーンにおける物理世界と仮想世界のデジタルツインを?qū)g現(xiàn)し、iRobotCAMロボットオフラインプログラミングソフトウェアとインテリジェンスを必要とするロボット間のPLC通信、関節(jié)動(dòng)作の精密制御などを?qū)g現(xiàn)し、デジタルツインの応用モデルを使用してロボットの教示とロボットアプリケーションプログラミングの相関関係を?qū)g証し、ロボットの応用シーンを直感的に表示します。
デジタルツインの応用については、現(xiàn)在業(yè)界內(nèi)に 2 つの異なる技術(shù)的ルートがあります。
- シミュレーション効果を重視するバーチャルリアリティルートでは、一般的にUnityなどのゲームエンジンを基本技術(shù)として採用し、さらに業(yè)界の特性に合わせて開発を進(jìn)め、必要なシミュレーションアプリケーション効果をカスタマイズします。
- 物理モデリングに基づいて、物理世界と仮想世界の間に橋を架けることで、現(xiàn)実と仮想の相互作用を?qū)g現(xiàn)し、真のデジタルツインを?qū)g現(xiàn)します。
技術(shù)応用の観點(diǎn)から見ると、物理世界をモデル化して形成されるデジタルツインの世界は、物理的な現(xiàn)実世界の主要要素の抽象モデルの離散性などの要因に直面して、多くの場合、より多くの研究開発投資を必要とします。ただし、産業(yè)用アプリケーションの場合、この真のデジタル ツイン アーキテクチャはさらに価値があります。複雑な物理シーンを仮想世界に効果的に提示できるだけでなく、ロボットの仮想デバッグをさらに進(jìn)めることで、物理世界の変化をさらに促進(jìn)することもできます。
産業(yè)用ロボットの応用分野に関しては、iRobotCAM ロボット オフライン プログラミング ソフトウェアの技術(shù)的選択の観點(diǎn)から、iRobotCAM は CAD データを基盤として使用し、物理世界と仮想世界の相互接続を?qū)g現(xiàn)し、真のデジタル ツイン アプリケーションを?qū)g現(xiàn)することを選択しました。具體的には、iRobotCAM 産業(yè)用ロボットオフラインプログラミングソフトウェアは、iRobotCAM の便利な仮想プログラミング環(huán)境の構(gòu)築をどのように実現(xiàn)するのでしょうか?
- ロボット、クイックチェンジ裝置、コンベアライン、各種センサーを含むモーター組立シミュレーション
- 仮想および現(xiàn)実の同期シミュレーション、生産ラインデータの収集、モーションコントローラデータとPLCデータのシミュレーションシステムへのマッピング
- コンベアライン、複數(shù)のロボット、材料システムなどのシステムシミュレーションをサポートします。 コンベアライン、複數(shù)のロボット、材料システムなどのシステムシミュレーションをサポートします。
iRobotCAM は、アプリケーション シナリオを迅速に構(gòu)築し、対応する通信モジュールに接続することで、ロボットの仮想デバッグとデジタル ツインのアプリケーション シナリオを?qū)g現(xiàn)できます。
YueQing Technologyについて
YueQing Technology は、生産ラインの電気機(jī)械コンセプト設(shè)計(jì)、ロボット処理プログラミングシミュレーション、仮想デバッグなどを統(tǒng)合したデジタルソリューションであるオープンな iRobotCAM 家庭用ロボット オフライン プログラミング ソフトウェア プラットフォームの作成に取り組んでいます。
iRobotCAM ウェブサイト: www.euromedic-care.com、連絡(luò)先メールアドレス: collaboration@iRobotCAM.com