Zusammenfassung: Die Schwierigkeit der robotergestützten Laserauftragschwei?verarbeitung zur Bearbeitung komplexer Werkstücke wie Schaufeln liegt in der Ausnutzung hochpr?ziser Eigenschaften. Die technischen Architekturvorteile von iRobotCAM auf Basis eines 3D-CAD-Kernels k?nnen die Anforderungen an hohe Pr?zision effektiv erfüllen und so eine hochpr?zise Laserauftragschwei?verarbeitung von fünfachsigen Schaufeln realisieren.
Design und Verarbeitung von Rotorbl?ttern müssen je nach Anwendungsszenario an die spezifischen Gegebenheiten angepasst werden. Von kleinen Ventilatorbl?ttern bis hin zu Flugzeugrotorbl?ttern. Je nach Anwendungsszenario für Industrieprodukte gibt es unterschiedliche Designelemente. Manche sind auf ?sthetik ausgerichtet, manche auf Ger?uscharmut und manche auf Leistung. Ob das Rotorblatt letztendlich den Anforderungen entspricht, h?ngt von den Bedürfnissen der verschiedenen Branchen und den Anforderungen der verschiedenen Prozessmethoden ab. Der Kern ist die Kontrolle der Pr?zision. Nur die Genauigkeit kann effektiv kontrolliert werden. Es gibt eine M?glichkeit, die Anforderungen verschiedener Szenarien zu erfüllen. Am Beispiel der robotergestützten Laserauftragschwei?verarbeitung von Rotorbl?ttern nutzt iRobotCAM seine CAD-basierte Architektur und verfügt über die Vorteile einer hochpr?zisen Architektur. Wie kann dies effektiv auf die Laserauftragschwei?verarbeitung angewendet werden?
Bei robotergestützten Laserbearbeitungsanwendungen l?uft der übliche Prozess wie folgt ab:
Roboter und Werkstück importieren > Werkstückpositionierung und Roboterkalibrierung > Trajektorienprogrammierung realisieren > Simulation aller Szenen > Codeausgabe und Roboterverarbeitung
- Mithilfe der Funktionen von iRobotCAM, die auf der 3D-CAD-Plattform basieren und 3D betrachten, k?nnen Sie schnell ein digitales Modell des Roboteranwendungsszenarios erstellen
- Mithilfe des elektromechanischen Moduls von iRobotCAM und der voreingestellten Roboterbibliothek k?nnen Sie relevante Roboter, Werkzeuge usw. für die Roboterszene definieren
- Entsprechend den Anforderungen des Laserbearbeitungsprozesses werden verschiedene 2- bis 5-Achsen-Trajektorien generiert, um die Trajektorienanforderungen bestimmter Szenarien zu erfüllen
- Basierend auf der Physik-Engine von iRobotCAM wird die Bewegung des Roboters simuliert, kalibriert und der entsprechende Ausführungscode ausgegeben.
Neben der technischen Architektur ist die Benutzerfreundlichkeit der Robotersoftware die unmittelbarste Wahrnehmungsebene. Die Benutzererfahrung ist dabei ein zentraler Indikator. Offen gesagt ist die Entwicklung von Industriesoftware keine Selbstverst?ndlichkeit. Von der technischen Architektur bis zur Benutzererfahrung hat inl?ndische Industriesoftware in den letzten Jahren jedoch gro?e Fortschritte gemacht. Angesichts der vielen Jahre ausl?ndischer Software k?nnen Sie auch inl?ndische Industriesoftware ausprobieren. Wenn Sie eine Offline-Programmiersoftware für Roboter suchen, k?nnen Sie auch iRobotCAM ausprobieren.
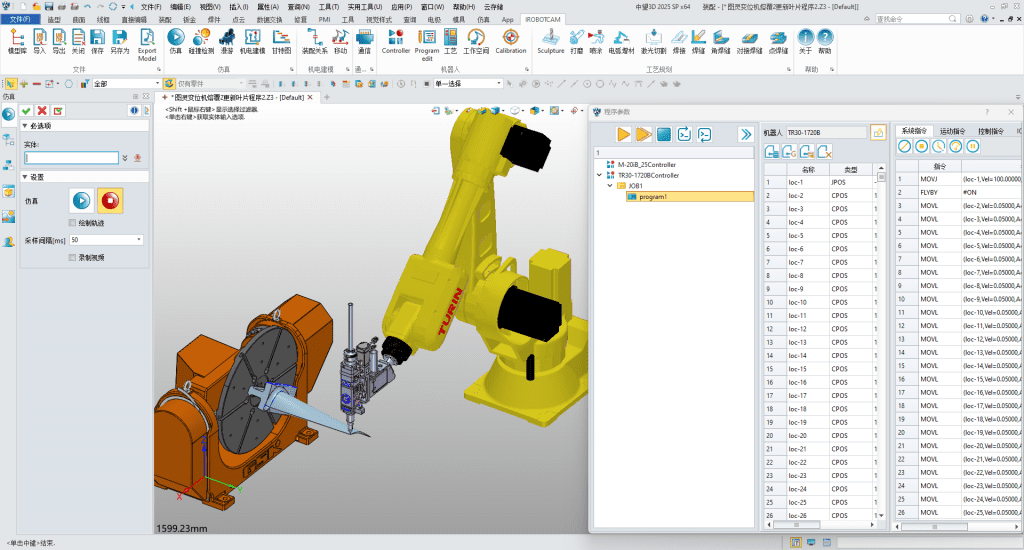
Am Beispiel der Verwendung eines Turin-Roboters zur Realisierung der Laserauftragschwei?verarbeitung von Fünf-Achsen-Bl?ttern: Wie kann iRobotCAM die Roboter-Laserverarbeitung Schritt für Schritt problemlos realisieren?
über Yueqing Technology
Yueqing Technology hat sich zum Ziel gesetzt, eine offene Offline-Programmierplattform für iRobotCAM-Roboter zu entwickeln. Dabei handelt es sich um eine digitale L?sung, die die elektromechanische Konzeption von Produktionslinien, die Simulation der Roboterverarbeitungsprogrammierung und virtuelles Debugging integriert.
iRobotCAM-Website: www.euromedic-care.com, Kontakt: cooperation@iRobotCAM.com