概要: ブレードなどの複雑なワークピースの加工におけるロボットレーザークラッディング加工の難しさは、高精度特性の活用にありますが、3D CAD カーネルに基づく iRobotCAM の技術(shù)的アーキテクチャの利點(diǎn)は、高精度の要件を効果的に満たし、5 軸ブレードの高精度レーザークラッディング加工を?qū)g現(xiàn)します。
ブレードの設(shè)計(jì)と加工は、小型ファンブレードから航空ブレードまで、さまざまな応用シナリオに応じて特定のシナリオに適応する必要があります。工業(yè)製品のさまざまな応用シナリオに応じて、設(shè)計(jì)要素が異なり、美しさを重視するもの、靜音性に基づくもの、性能に基づくものなどがあり、ブレードが最終的にニーズを満たすかどうかは、さまざまな業(yè)界のニーズとさまざまな加工方法の要件に関係しています。核心は精度の制御であり、精度を効果的に制御するだけで、さまざまなシナリオのニーズを満たす方法があります。ブレードのロボットレーザークラッディング加工を例にとると、iRobotCAMはCADベースのアーキテクチャを活用し、高精度アーキテクチャの利點(diǎn)を備えていますが、それをどのようにレーザークラッディング加工に効果的に適用するのでしょうか。
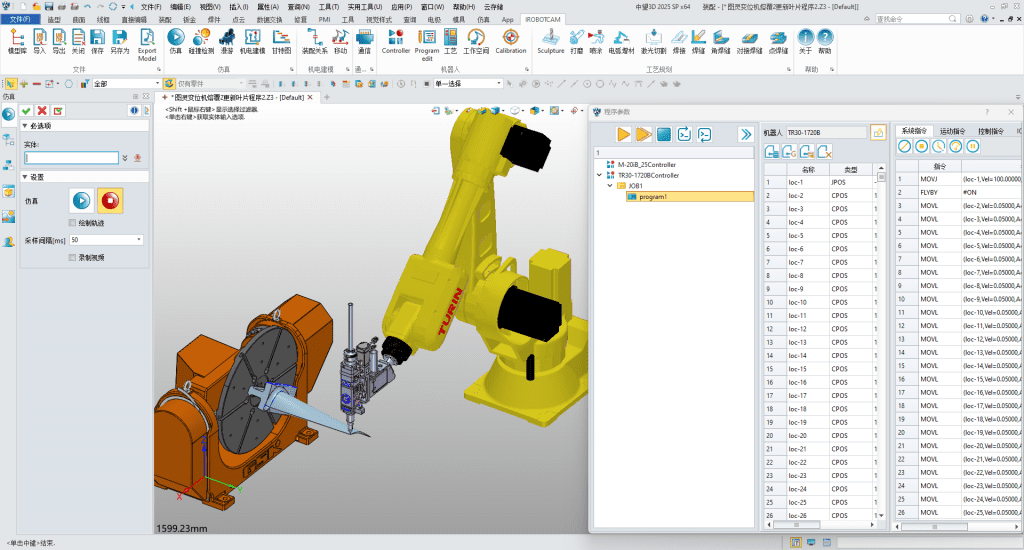
ロボットによるレーザー加工アプリケーションの場(chǎng)合、通常のプロセスは次のとおりです。
ロボットとワークピースのインポート > ワークピースの位置決めとロボットのキャリブレーション > 軌道プログラミングの実現(xiàn) > 全シーンのシミュレーション > コード出力とロボット処理
- 3D CADプラットフォームに基づくiRobotCAMの特性を活用し、3Dで見ることで、ロボットアプリケーションシナリオのデジタルモデルを迅速に構(gòu)築できます。
- iRobotCAMの電気機(jī)械モジュールとプリセットロボットライブラリを使用して、ロボットシーンに関連するロボット、ツールなどを定義できます。
- レーザー加工プロセスのニーズに応じて、特定のシナリオの軌道要件を満たすために、2軸から5軸までのさまざまな軌道が生成されます。
- iRobotCAM の物理エンジンに基づいて、ロボットの動(dòng)きをシミュレートし、調(diào)整し、対応する実行コードを出力します。
技術(shù)アーキテクチャに加えて、ユーザーが最も直接的に認(rèn)識(shí)するのは、ロボットソフトウェアのプログラミングの容易さであり、ユーザーエクスペリエンスはコア指標(biāo)の一つです。率直に言って、産業(yè)用ソフトウェアの進(jìn)歩は一朝一夕でできるものではありませんが、技術(shù)アーキテクチャからユーザーエクスペリエンスに至るまで、國産産業(yè)用ソフトウェアは近年大きな進(jìn)歩を遂げています。長年にわたる海外製ソフトウェアの進(jìn)化を踏まえ、國産産業(yè)用ソフトウェアも検討してみる価値はあるでしょう。ロボットのオフラインプログラミングソフトウェアを選ぶ際には、iRobotCAMを試してみるのも良いでしょう。
Turin ロボットを使用して 5 軸ブレードのレーザークラッディング加工を?qū)g現(xiàn)することを例にとると、iRobotCAM はどのようにしてロボットによるレーザー加工を段階的に簡単に実現(xiàn)するのでしょうか。
Yueqing Technologyについて
Yueqing Technology は、生産ラインの電気機(jī)械概念設(shè)計(jì)、ロボット処理プログラミングシミュレーション、仮想デバッグを統(tǒng)合したデジタルソリューションであるオープンな iRobotCAM ロボット オフライン プログラミング プラットフォームの構(gòu)築に取り組んでいます。
iRobotCAMウェブサイト: www.euromedic-care.com、連絡(luò)先:cooperation@iRobotCAM.com