Streszczenie: Zastosowanie robotów wspó?pracuj?cych pomaga uwolni? du?? ilo?? powtarzalnej pracy r?cznej i znacznie poprawi? wydajno?? produkcji. Podstaw? ró?nych aplikacji robotów wspó?pracuj?cych jest programowanie i symulacja robotów. Dzi?ki oprogramowaniu do programowania robotów domowych w trybie offline iRobotCAM roboty wspó?pracuj?ce, takie jak Yuejiang, mog? by? szybko u?ywane do realizacji programowania robotów i wirtualnej symulacji.
Dzi?ki rosn?cej elastyczno?ci aplikacji robotów, zw?aszcza wysokiemu stopniowi swobody i wysokiej precyzji robotów wspó?pracuj?cych, bran?e takie jak lotnictwo, motoryzacja i elektronika przyj??y du?? liczb? robotów wspó?pracuj?cych, aby uwolni? powtarzaln? prac? r?czn? i znacznie poprawi? wydajno?? produkcji. Programowanie i symulacja ró?nych scenariuszy wspó?pracy robotów stanowi? podstaw? aplikacji robotów wspó?pracuj?cych. W tym artykule przedstawiono iRobotCAM, oprogramowanie do programowania robotów domowych w trybie offline opracowane na podstawie platformy modelowania 3D CAD, i wykorzystano robota wspó?pracuj?cego debot jako przyk?ad, aby przedstawi?, jak szybko u?ywa? robotów wspó?pracuj?cych debot do realizacji programowania spawania robotów i wirtualnej symulacji.

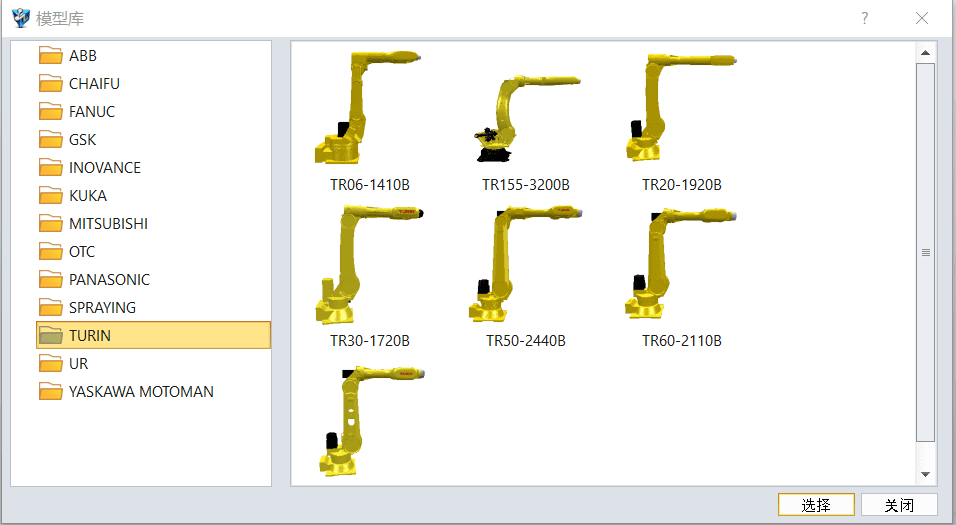
- Dzi?ki bibliotece robotów iRobotCAM mo?esz u?ywa? istniej?cych bibliotek robotów ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turin, UR, Yaskawa i innych lub szybko tworzy? nowe biblioteki robotów wspó?pracuj?cych, takie jak debot Robotics, w razie potrzeby. Bibliotek? mo?na utworzy? za pomoc? prostych definicji po??czeń..
2. Skorzystaj z wygodnej funkcji nauczania iRobotCAM, aby uzyska? programowanie nauczania poprzez proste przeci?ganie i upuszczanie

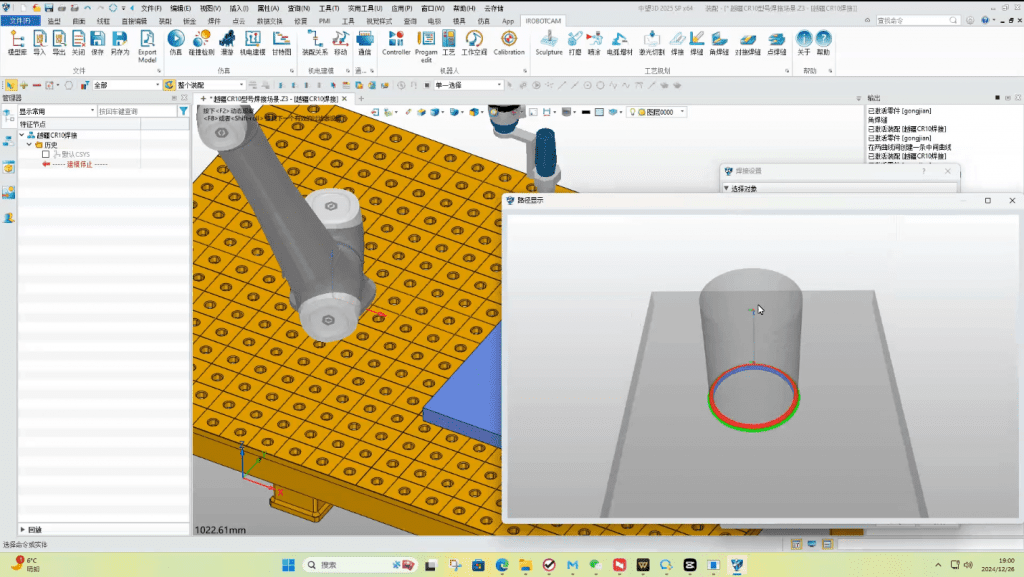
3. Za pomoc? modu?u spawalniczego mo?na szybko oznaczy? pozycj? spawania i generowa? programy funkcji spawalniczych.

4. Wykorzystuj?c bogate mo?liwo?ci trajektorii od dwóch do pi?ciu osi oprogramowania iRobotCAM, mo?na szybko generowa? trajektorie programowania spoin i symulowa? te trajektorie.

5 Wykorzystuj?c efekt symulacji robota w iRobotCAM, mo?na dodatkowo zweryfikowa? i symulowa? efekt spawania robota.
6. W scenariuszach zastosowań robotów iRobotCAM mo?na wykorzysta? do symulacji ca?ego procesu spawania robota i intuicyjnego podgl?du procesu spawania.
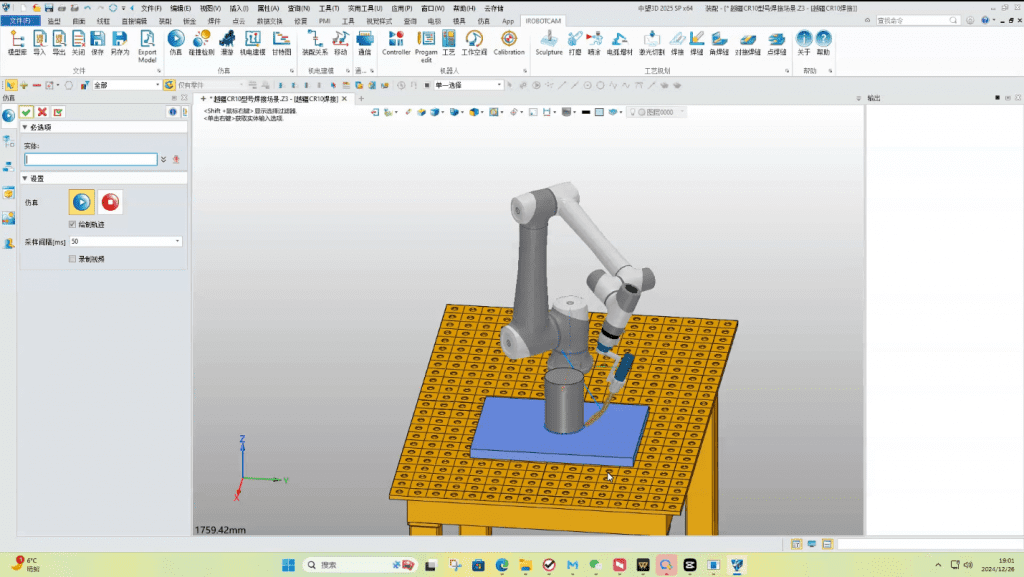
Poni?ej znajduje si? film pokazuj?cy programowanie i symulacj? spawania przy u?yciu robota wspó?pracuj?cego debot.
O technologii Yueqing
Yueqing Technology stawia sobie za cel zbudowanie otwartej platformy do programowania robotów offline iRobotCAM. Platforma ta jest cyfrowym rozwi?zaniem integruj?cym elektromechaniczny projekt koncepcyjny linii produkcyjnych, symulacj? programowania przetwarzania robotów oraz wirtualne debugowanie.
iRobotCAM website: www.euromedic-care.com; Contact: cooperation@iRobotCAM.com