Abstrakt: Yueqing Technology vydala bílou knihu o programování a simula?ní technologii laserového zpracování, která popisuje potí?e s vysoce p?esnym ?ízením aplikace technologie laserového zpracování a dále pojednává o trajektorii a simula?ním schématu laserového zpracování, jak efektivně vyu?ít iRobotCAM k dokon?ení laserového zpracování a simulace a vyrazně zlep?it vyvoj za?ízení pro scéná?e aplikací laserovych proces? a efektivitu aplikací laserovych proces?.
- P?ehled laserového pr?myslu
Laserovy pr?mysl má obrovsky rozsah zaměstnanosti a budoucí velikost trhu a pr?mysl se nachází v období rychlého rozvoje.
- Charakteristika laserové technologie
Největ?í procesní charakteristikou laseru je vysoká p?esnost. Abychom dále porozuměli aplikaci laserové technologie, vycházíme ze scéná?e za?ízení pro aplikaci laserové technologie a bereme vyvoj a aplikaci laserovych obráběcích stroj? a aplikací robotického laserového zpracování jako typické aplikace, abychom dále analyzovali její potí?e a dále vysvětlili ?e?ení.
- Vyvoj a aplikace laserovych obráběcích stroj?
Po?ínaje procesem vyvoje za?ízení laserovych obráběcích stroj? m??eme dále porozumět aplika?ním problém?m a ?e?ením laserové technologie na obráběcích strojích.
Proces vyvoje laserového obráběcího stroje: 3D modelování struktury < elektromechanické modelování a simulace pohybu < generování trajektorie a virtuální ladění < simulace postprocesingu a zpracování
Následující text pou?ívá iRobotCAM jako softwarové ?e?ení pro vyvoj a ladění laserovych obráběcích stroj? k vysvětlení, jak krok za krokem implementovat vyvoj laserovych obráběcích stroj? a virtuální ladění a realizovat hromadnou vyrobu a aplikaci laserovych obráběcích stroj?.
1) 3D modelování struktury: iRobotCAM vyu?ívá charakteristiky 3D CAD platformy k rychlému vytvo?ení digitálního modelu 3D struktury obráběcího stroje.
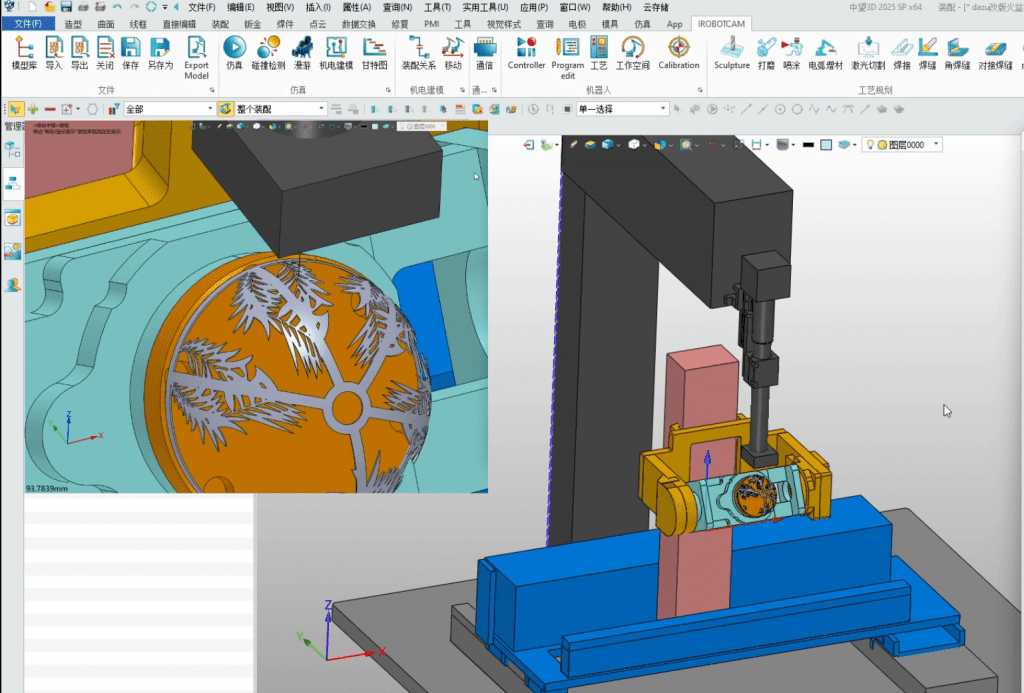
2) Elektromechanické modelování a simulace pohybu: iRobotCAM má modul elektromechanického modelování, ktery lze pou?ít pro modelování a navrhování vyrobních linek a virtuální ladění robot?. P?ed skute?nou vyrobou lze proces laserového zpracování simulovat ve virtuálním prost?edí, aby se p?edem odhalily a vy?e?ily mo?né problémy, jako je kolize pohybu robota, kontrola singularity robota, dosa?itelnost a kolize a chyby dráhy laseru atd., aby se sní?ily chyby a rizika p?i skute?ném ladění a zlep?ila se efektivita a bezpe?nost vyroby.
3) Generování trajektorie a virtuální ladění: Vyvinuto na platformě ZW3D, m??e vyu?ívat r?zné 2osé a? 5osé algoritmy trajektorie ZW3D, tak?e robot má během procesu laserového zpracování p?esné algoritmy trajektorie podobné softwaru CAM a m??e p?esně zamě?it laserovy paprsek, sva?ovací paprsek s vysokou p?esností, ?ezání a dal?í zpracování. procesy, zaji??ující kvalitu a konzistenci zpracování.
4). Simulace následného zpracování a obrábění: Pohodlny modul následného zpracování iRobotCAM m??e rychle generovat kód a intuitivně zobrazovat efekty simulace obrábění
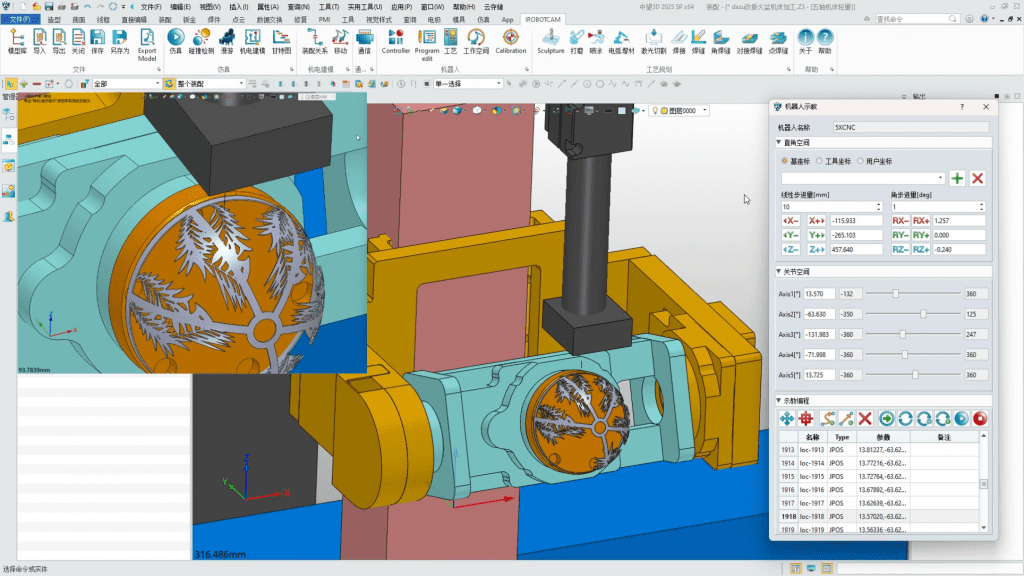
Poj?me se podívat na to, jak iRobotCAM pou?ívá 5osé obráběcí stroje k dosa?ení laserového zpracování a simulace:
4. Aplikace robotické laserové technologie
Robotická laserová technologie je hlavně vysoce p?esná a schopnost dosáhnout vysoce p?esné vyroby pomocí laser? je základem pro r?zná pr?myslová odvětví, jako je letecky pr?mysl, automobily a strojní za?ízení, aby bylo dosa?eno vysoce vykonnych nebo vysoce p?esnych za?ízení. Co se ty?e robotického pr?myslu, jaké jsou potí?e p?i aplikaci laserové technologie? Jak rychle realizovat aplikaci robotické laserové technologie?
Za prvé, u technologie robotického laserového zpracování je obecny proces následující:
Import robota a obrobku> Polohování obrobku a kalibrace robota> Realizace programování trajektorie> Simulace celé scény> Vystup kódu a zpracování robotem
Z vy?e uvedeného procesu je vidět, ?e tě?i?těm laserové technologie je vytvo?ení digitálního prost?edí a vystup a simulace kódu. Vezměme si jako p?íklad offline programovací software iRobotCAM, ktery vysvětluje, jak pou?ívat iRobotCAM k dosa?ení efektivní aplikace robotické laserové technologie.
1). Pomocí iRobotCAM, ktery je zalo?en na schopnosti 3D CAD platformy, lze rychle modelovat digitalizaci za?ízení a proces?.
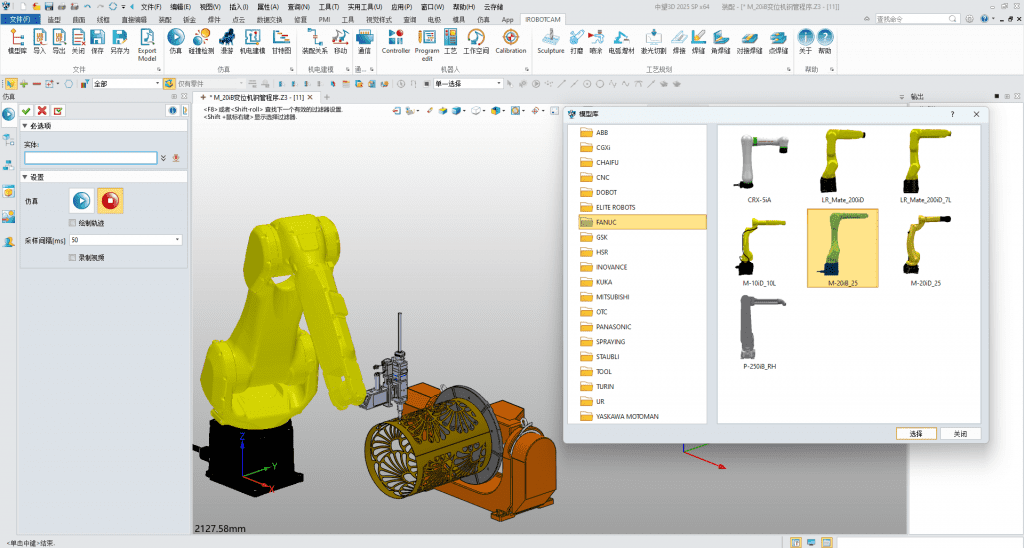
2). Pomocí strojové knihovny iRobotCAM m??ete rychle stavět roboty nebo nástroje související s laserovymi aplikacemi, ani? byste museli v budoucnu opakovaně budovat knihovny základních díl?, a pomáháte spole?nostem efektivněji vyu?ívat digitální modely.
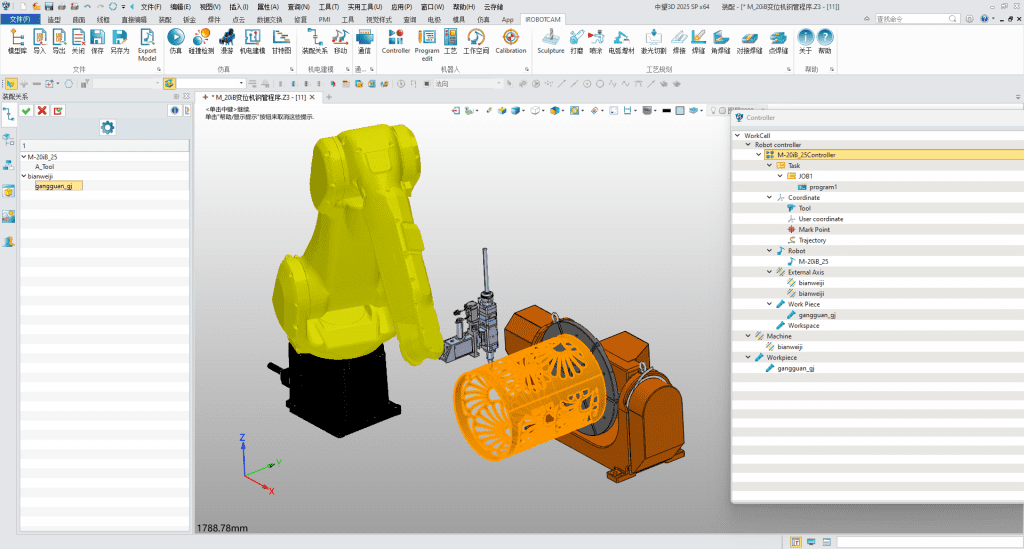
3). Vyu?itím jedine?né polohovací funkce iRobotCAM lze obrobek rychle a p?esně umístit podle po?adavk? na laserové zpracování. P?esněji ?e?eno, iRobotCAM m??e dosáhnout polohování obrobku za r?znych pracovních podmínek na základě funkcí CAD obrobku.
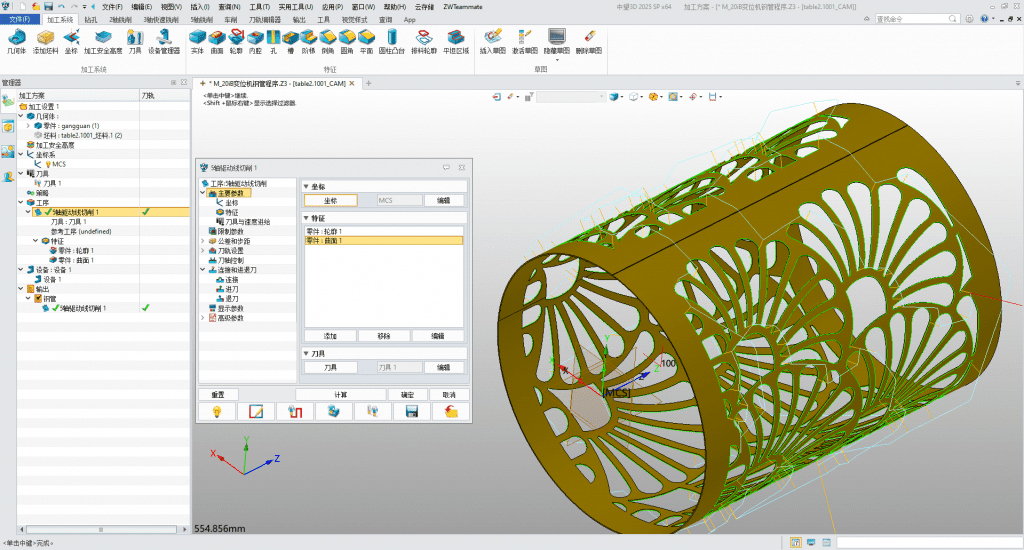
4). Vyu?itím schopnosti generování trajektorií iRobotCAM je mo?né generovat slo?ité víceosé trajektorie na zak?ivenych povr?ích a realizovat aplikaci laserovych proces? pro roboty s více ne? 7 osami.
5). Schopnosti virtuálního ladění robot? iRobotCAM lze pou?ít k realizaci programování robotické laserové scény a virtuální simulace a efektivně sledovat aplika?ní efekt robotické technologie.
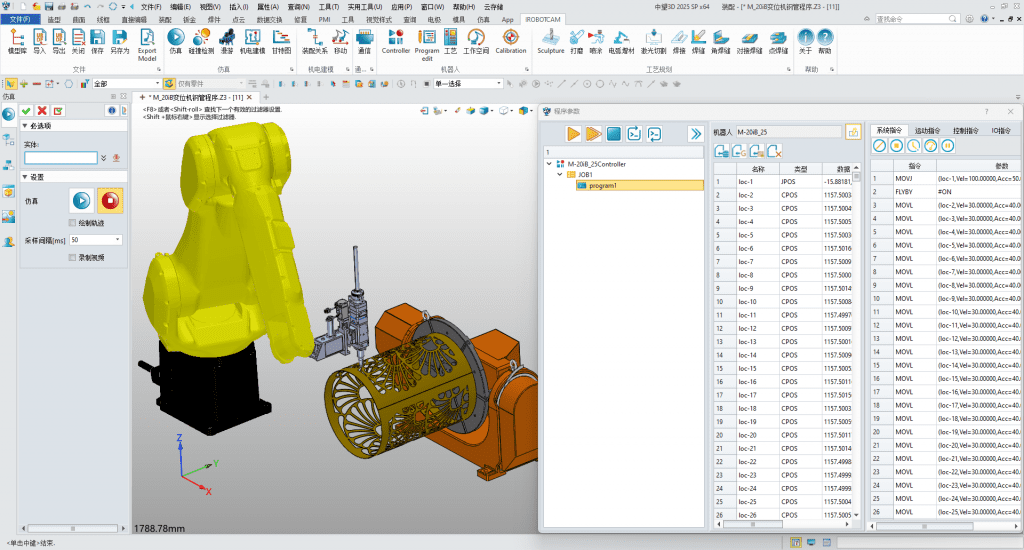
6. Vyu?itím mo?ností následného zpracování iRobotCAM se m??ete efektivně p?izp?sobit r?znym typ?m robot? v?etně FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin atd. a efektivně pou?ívat jednu sadu softwaru pro správu více zna?ek nebo více za?ízení.
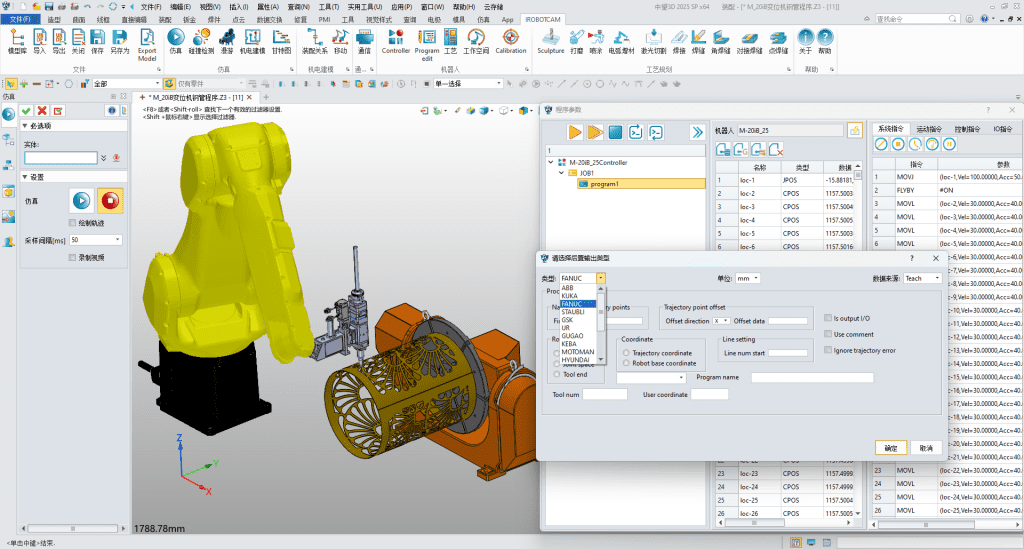
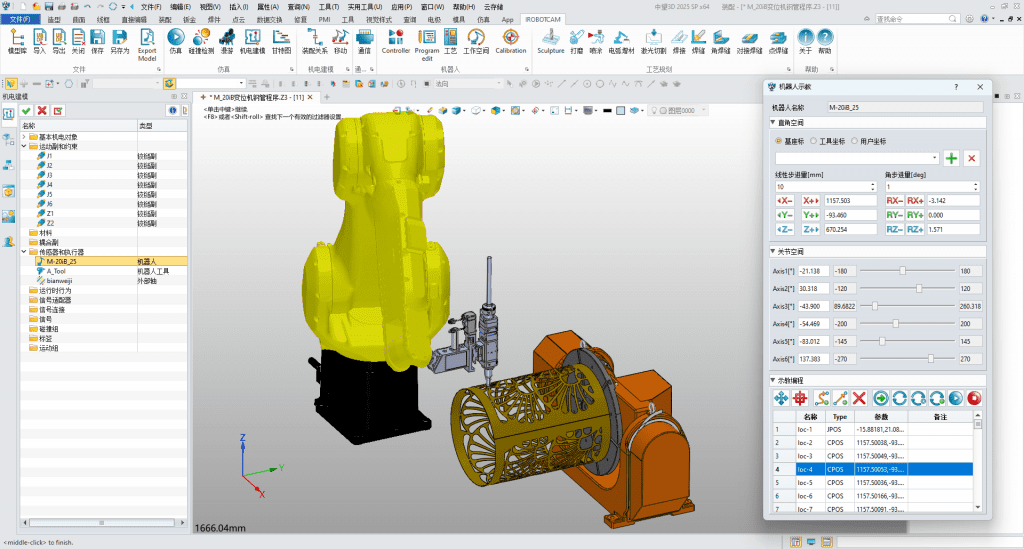
Dále se podívejme, jak iRobotCAM vyu?ívá roboty k dosa?ení 5osého zpracování dutého vzoru. Prost?ednictvím flexibilních mo?ností programování iRobotCAM lze dosáhnout 5osého generování trajektorie a rychlé simulace robota.
5. Shrnutí
Základním bodem aplikace laserové technologie je p?esnost, která vy?aduje programování a simulaci, aby byl návrh architektury vysoce p?esny. Prost?ednictvím vy?e uvedenych typickych p?ípad? aplikace 5osého laserového obráběcího stroje a aplika?ních scéná?? robotického víceosého laserového zpracování lze vidět, ?e vyběr iRobotCAM jako ?e?ení pro laserové zpracování a virtuální ladění m??e ú?inně vy?e?it základní problém s vysokou p?esností laserového zpracování. A dal?í roz?í?ení, jako procesní aplikace laserového zpracování, m??e iRobotCAM dále roz?í?it svou aplikaci ve více scéná?ích v?etně ?ezání laserem, laserového plátování, aplikací obloukové aditivní vyroby atd. díky otev?enosti své technické architektury a odrá?et její zjevné vysoce p?esné technické vyhody.
O technologii Yueqing
Yueqing Technology se zavázala k vybudování otev?ené offline programovací platformy robot? iRobotCAM, co? je digitální ?e?ení integrující elektromechanicky koncep?ní návrh vyrobních linek, simulaci programování zpracování robot? a virtuální ladění.
webové stránky iRobotCAM: www.euromedic-care.com; Kontakt: cooperation@iRobotCAM.com