Zusammenfassung: Yueqing Technology hat ein Whitepaper zur Programmierung und Simulationstechnologie für die Laserbearbeitung ver?ffentlicht, in dem die Schwierigkeiten der hochpr?zisen Steuerung der Anwendung von Laserbearbeitungstechnologie beschrieben werden. Au?erdem werden die Trajektorie und das Simulationsschema der Laserbearbeitung er?rtert und erl?utert, wie iRobotCAM effektiv zur Durchführung der Laserbearbeitung und -simulation eingesetzt werden kann und wie die Ger?teentwicklung für Anwendungsszenarien und die Anwendungseffizienz von Laserprozessen erheblich verbessert werden kann.
- überblick über die Laserindustrie
Die Laserindustrie verfügt über ein enormes Besch?ftigungs- und Zukunftsmarktpotenzial und befindet sich in einer Phase rasanter Entwicklung.
- Eigenschaften der Lasertechnologie
Das wichtigste Prozessmerkmal des Lasers ist seine hohe Pr?zision. Um die Anwendung der Lasertechnologie besser zu verstehen, betrachten wir zun?chst die Ger?teanwendung und betrachten die Entwicklung und Anwendung von Laserwerkzeugmaschinen und Roboter-Laserbearbeitungsanwendungen als typische Anwendungen, um die Schwierigkeiten genauer zu analysieren und die L?sungen zu erl?utern.
- Entwicklung und Anwendung von Laserwerkzeugmaschinen
Ausgehend vom Ger?teentwicklungsprozess für Laserwerkzeugmaschinen k?nnen wir die Anwendungsschwierigkeiten und -l?sungen der Lasertechnologie auf Werkzeugmaschinen besser verstehen.
Entwicklungsprozess von Laserwerkzeugmaschinen: 3D-Strukturmodellierung < elektromechanische Modellierung und Bewegungssimulation < Trajektoriengenerierung und virtuelles Debugging < Nachbearbeitung und Verarbeitungssimulation
Im Folgenden wird anhand von iRobotCAM als Softwarel?sung für die Entwicklung und das Debuggen von Laserwerkzeugmaschinen erkl?rt, wie die Entwicklung und das virtuelle Debuggen von Laserwerkzeugmaschinen Schritt für Schritt umgesetzt und die Massenproduktion und Anwendung von Laserwerkzeugmaschinen realisiert werden kann.
1) 3D-Strukturmodellierung: iRobotCAM nutzt die Eigenschaften der 3D-CAD-Plattform, um schnell ein digitales Modell der 3D-Struktur der Werkzeugmaschine zu erstellen.
2) Elektromechanische Modellierung und Bewegungssimulation: iRobotCAM verfügt über ein elektromechanisches Modellierungsmodul, das für die Modellierung und Konstruktion von Produktionslinien sowie das virtuelle Debuggen von Robotern verwendet werden kann. Vor der eigentlichen Produktion kann der Laserbearbeitungsprozess in einer virtuellen Umgebung simuliert werden, um m?gliche Probleme im Voraus zu erkennen und zu l?sen, wie z. B. Kollisionsst?rungen der Roboterbewegung, die überprüfung der Robotersingularit?t, Erreichbarkeit und Kollision sowie Laserpfadfehler usw., um Fehler und Risiken beim tats?chlichen Debuggen zu reduzieren und die Produktionseffizienz und -sicherheit zu verbessern.
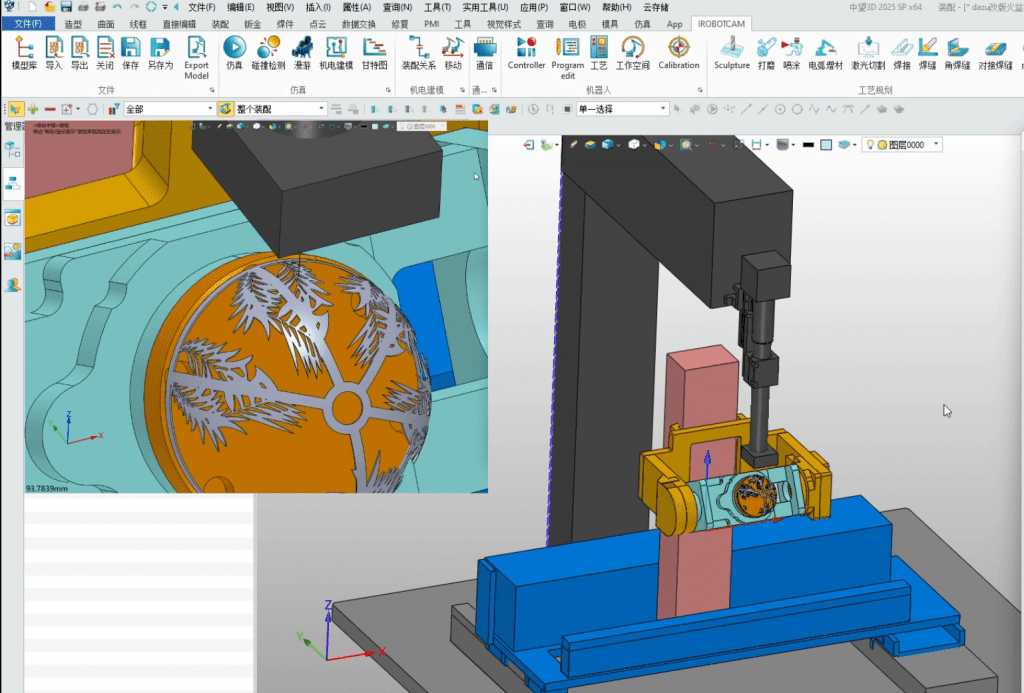
3) Trajektoriengenerierung und virtuelles Debugging: Basierend auf der ZW3D-Plattform entwickelt, kann es die verschiedenen 2- bis 5-Achsen-Trajektorienalgorithmen von ZW3D nutzen, sodass der Roboter w?hrend des Laserverarbeitungsprozesses über genaue Trajektorienalgorithmen ?hnlich der CAM-Software verfügt und den Laserstrahl pr?zise auf das Verarbeitungsteil fokussieren kann, wodurch hochpr?zises Laserschneiden, -schwei?en, -gravieren und andere Prozesse realisiert werden und die Verarbeitungsqualit?t und -konsistenz sichergestellt wird.
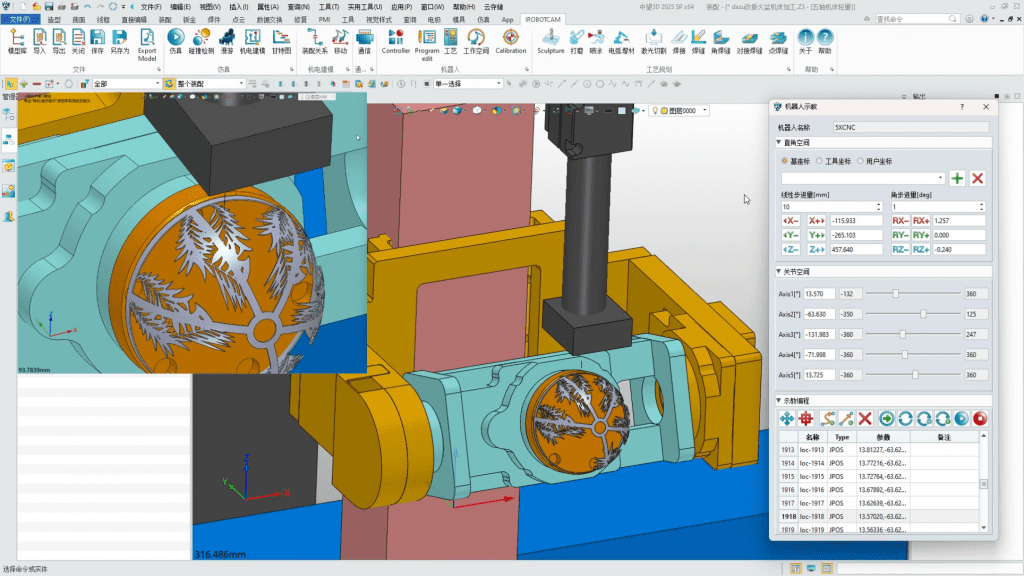
4). Nachbearbeitung und Bearbeitungssimulation: Das praktische Nachbearbeitungsmodul von iRobotCAM kann schnell Code generieren und Bearbeitungssimulationseffekte intuitiv anzeigen
Sehen wir uns an, wie iRobotCAM 5-Achsen-Werkzeugmaschinen zur Laserbearbeitung und -simulation nutzt:
4. Anwendung der Roboterlasertechnologie
Die Roboterlasertechnologie zeichnet sich durch hohe Pr?zision aus. Die F?higkeit, mit Lasern hochpr?zise zu fertigen, bildet die Grundlage für die Entwicklung leistungsstarker und hochpr?ziser Ger?te in verschiedenen Branchen wie der Luft- und Raumfahrt, der Automobilindustrie und dem Maschinenbau. Welche Schwierigkeiten ergeben sich in der Roboterindustrie bei der Anwendung der Lasertechnologie? Wie l?sst sich die Anwendung der Roboterlasertechnologie schnell realisieren?
Zun?chst einmal ist der allgemeine Prozess der Roboter-Laserbearbeitungstechnologie wie folgt:
Roboter und Werkstück importieren > Positionierung des Werkstücks und Roboterkalibrierung > Durchführung der Trajektorienprogrammierung > Simulation der gesamten Szene > Codeausgabe und Roboterverarbeitung
Der obige Prozess zeigt, dass der Schwerpunkt der Lasertechnologie auf der Einrichtung einer digitalen Umgebung sowie der Ausgabe und Simulation von Code liegt. Am Beispiel der Offline-Programmiersoftware iRobotCAM wird erl?utert, wie sich mit iRobotCAM die Roboterlasertechnologie effizient einsetzen l?sst.
1) Mit iRobotCAM, das auf der F?higkeit der 3D-CAD-Plattform basiert, kann die Digitalisierung von Ger?ten und Prozessen schnell modelliert werden
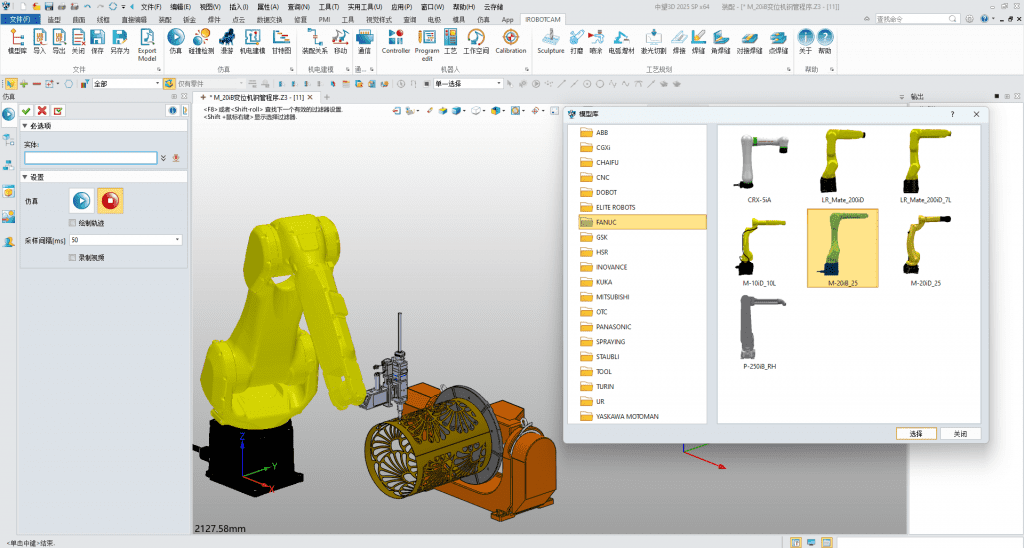
2) Mit der Maschinenbibliothek von iRobotCAM k?nnen Sie schnell Roboter oder Werkzeuge für Laseranwendungen erstellen. So müssen Sie künftig nicht mehr wiederholt grundlegende Teilebibliotheken erstellen. Unternehmen k?nnen digitale Modelle effizienter nutzen.
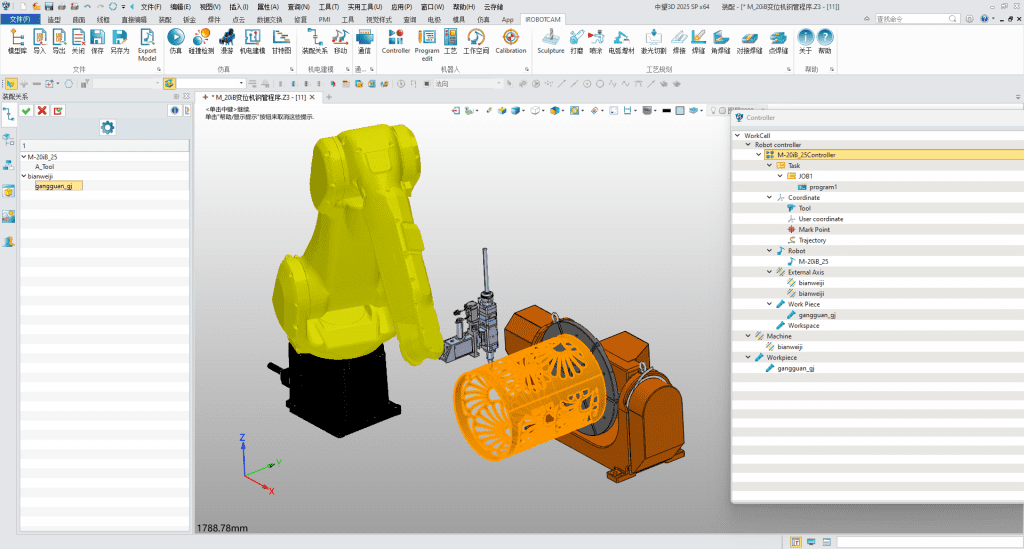
3). Durch die einzigartige Positionierungsfunktion von iRobotCAM l?sst sich das Werkstück schnell und pr?zise entsprechend den Anforderungen der Laserbearbeitung positionieren. Genauer gesagt erm?glicht iRobotCAM die Werkstückpositionierung unter verschiedenen Arbeitsbedingungen basierend auf den CAD-Funktionen des Werkstücks.
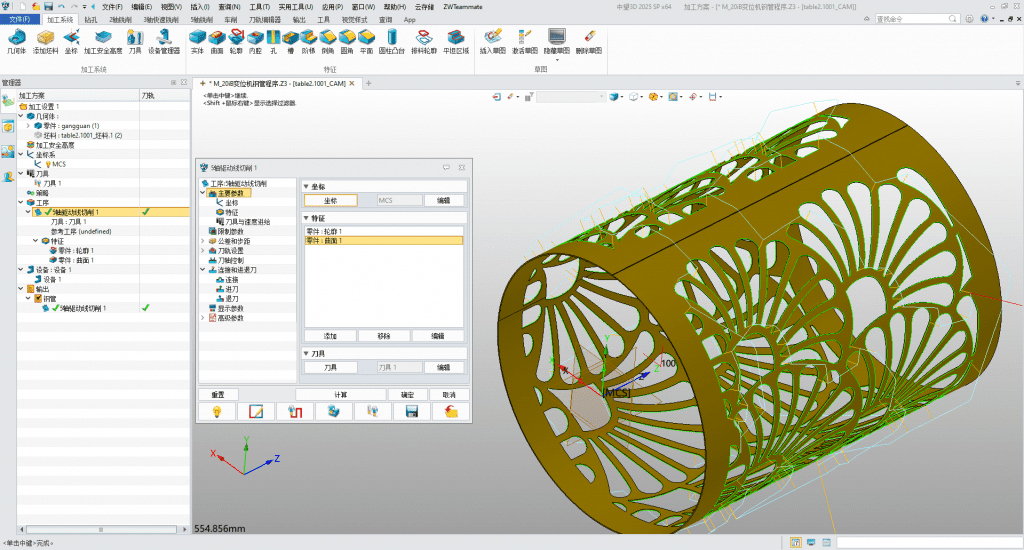
4) Durch die Nutzung der Trajektoriengenerierungsfunktion von iRobotCAM ist es m?glich, komplexe mehrachsige Trajektorien auf gekrümmten Oberfl?chen zu erzeugen und die Anwendung von Laserprozessen für Roboter mit mehr als 7 Achsen zu realisieren.
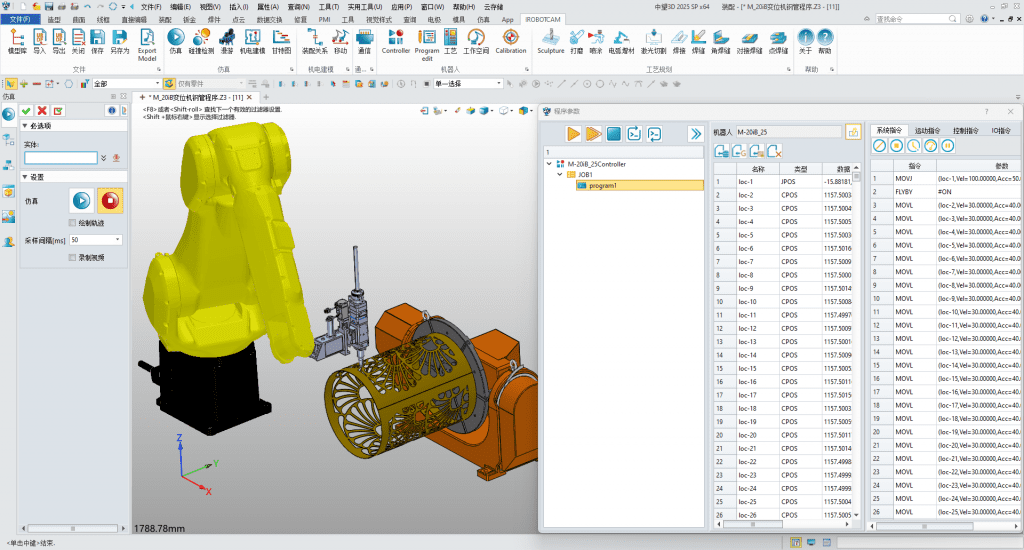
5). Mit den virtuellen Roboter-Debugging-Funktionen von iRobotCAM k?nnen die Programmierung von Roboter-Laserszenen und die virtuelle Simulation realisiert und die Anwendungseffekte der Robotertechnologie effizient angezeigt werden.
6. Durch die Nutzung der Nachbearbeitungsfunktionen von iRobotCAM k?nnen Sie sich effizient an verschiedene Robotertypen anpassen, darunter FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin usw., und einen Softwaresatz effizient verwenden, um mehrere Marken oder mehrere Ger?te zu verwalten.
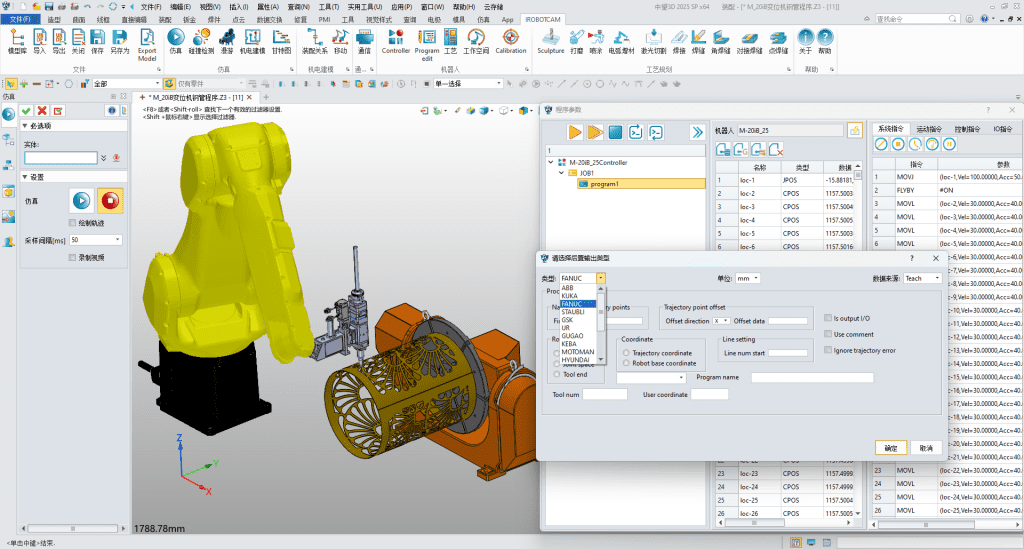
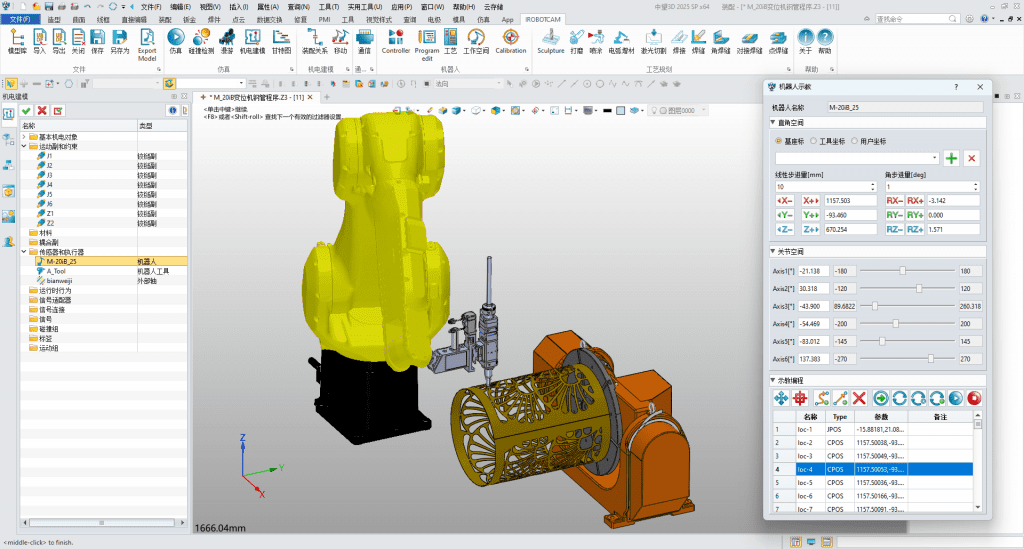
Als N?chstes sehen wir uns an, wie iRobotCAM Roboter zur 5-achsigen Hohlmusterverarbeitung einsetzt. Dank der flexiblen Programmierfunktionen von iRobotCAM lassen sich 5-achsige Trajektorien generieren und Robotersimulationen schnell durchführen.
5. Zusammenfassung
Der Kernpunkt der Lasertechnologieanwendung ist Pr?zision. Dies erfordert Programmierung und Simulation, um eine hochpr?zise Architektur zu gew?hrleisten. Die oben genannten typischen Anwendungsf?lle für 5-achsige Laserbearbeitungsmaschinen und robotergestützte Mehrachsen-Laserbearbeitungsszenarien zeigen, dass die Wahl von iRobotCAM als L?sung für Laserbearbeitung und virtuelles Debugging das zugrunde liegende Hochpr?zisionsproblem der Laserbearbeitung effektiv l?sen kann. Darüber hinaus kann iRobotCAM als Prozessanwendung der Laserbearbeitung seine Anwendung aufgrund der Offenheit seiner technischen Architektur auf weitere Szenarien wie Laserschneiden, Laserauftragschwei?en, additive Fertigung mit Lichtbogentechnik usw. erweitern und seine offensichtlichen technischen Vorteile in Bezug auf Hochpr?zision unter Beweis stellen.
über Yueqing Technology
Yueqing Technology hat sich zum Ziel gesetzt, eine offene Offline-Programmierplattform für iRobotCAM-Roboter zu entwickeln. Dabei handelt es sich um eine digitale L?sung, die die elektromechanische Konzeption von Produktionslinien, die Simulation der Roboterverarbeitungsprogrammierung und virtuelles Debugging integriert.
iRobotCAM-Website: www.euromedic-care.com; Kontakt: cooperation@iRobotCAM.com