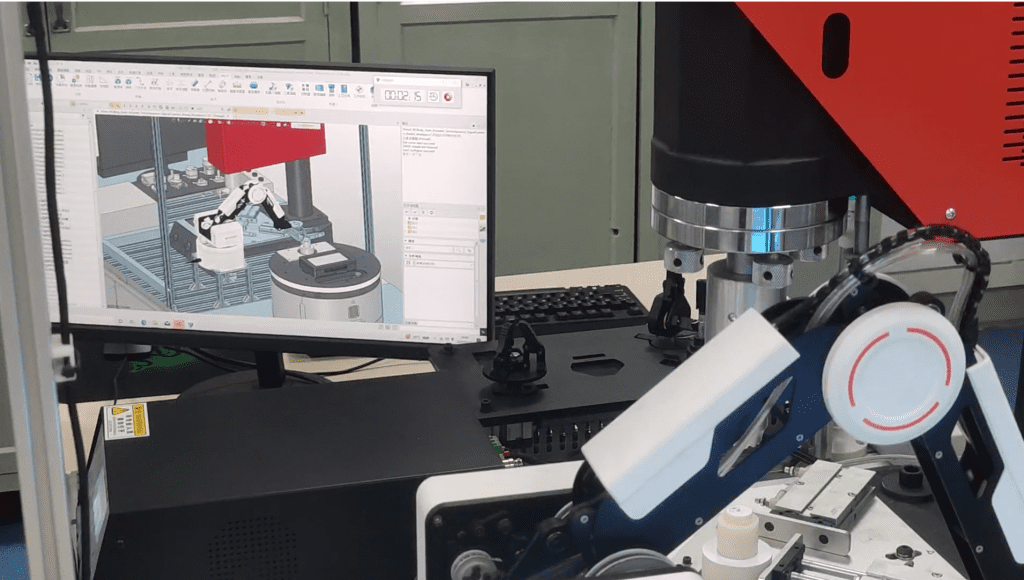
Streszczenie: Wuhan Needs Intelligence nawi?za?o wspó?prac? z Nanjing Yueqing Technology w celu stworzenia prototypu cyfrowego bli?niaka robota, zademonstrowania korelacji mi?dzy nauczaniem robota a programowaniem aplikacji robota oraz intuicyjnego zaprezentowania scenariuszy zastosowań robota.
Wuhan Needs Intelligence nawi?za?o wspó?prac? z Nanjing Yueqing Technology w celu stworzenia cyfrowych bli?niaków ?wiata fizycznego i wirtualnego na potrzeby scenariuszy zastosowań robotów, opracowania oprogramowania do programowania robotów w trybie offline iRobotCAM oraz komunikacji PLC robotów wymagaj?cych inteligencji, precyzyjnej kontroli ruchów stawów itp. przy u?yciu cyfrowego modelu aplikacji bli?niaczych. Model ten pokazuje korelacj? mi?dzy nauczaniem robotów a programowaniem zastosowań robotów i intuicyjnie wy?wietla scenariusze zastosowań robotów.
W bran?y istniej? obecnie dwie ró?ne ?cie?ki techniczne wdra?ania cyfrowych bli?niaków.
Technologia wirtualnej rzeczywisto?ci, która koncentruje si? na efektach symulacji, zazwyczaj wykorzystuje jako technologi? podstawow? silniki gier, np. Unity, a nast?pnie jest rozwijana w oparciu o specyfik? bran?y, aby dostosowa? wymagane efekty symulacji.
Na podstawie modelowania fizycznego i poprzez ustanowienie pomostu mi?dzy ?wiatem fizycznym i wirtualnym realizowana jest interakcja mi?dzy rzeczywisto?ci? i wirtualno?ci?, dzi?ki czemu powstaje prawdziwy cyfrowy bli?niak.
Pod wzgl?dem zastosowania technologii, cyfrowy ?wiat bli?niaczy utworzony przez modelowanie ?wiata fizycznego cz?sto wymaga wi?kszych inwestycji w badania i rozwój w obliczu dyskretnych abstrakcyjnych modeli kluczowych elementów fizycznego ?wiata rzeczywistego. Jednak w przypadku zastosowań przemys?owych ta prawdziwa architektura cyfrowego bli?niaka ma wi?ksz? warto??. Mo?e skutecznie prezentowa? z?o?one sceny fizyczne w ?wiecie wirtualnym, a tak?e mo?e dalej nap?dza? zmiany w ?wiecie fizycznym poprzez dalsze wirtualne debugowanie robotów.
W przypadku obszarów zastosowań robotów przemys?owych, je?li chodzi o techniczny wybór oprogramowania do programowania robotów offline iRobotCAM, wybór iRobotCAM opiera si? na danych CAD, aby osi?gn?? interoperacyjno?? mi?dzy ?wiatem fizycznym a ?wiatem wirtualnym i zrealizowa? prawdziwe aplikacje cyfrowego bli?niaka. W szczególno?ci, w jaki sposób oprogramowanie do programowania robotów przemys?owych offline iRobotCAM realizuje konstrukcj? wygodnego wirtualnego ?rodowiska programowania iRobotCAM?
- Symulacja monta?u silników, w tym robotów, urz?dzeń szybkiej wymiany, linii przeno?nikowych i ró?nych czujników
- Wirtualna i rzeczywista symulacja synchroniczna, zbieranie danych z linii produkcyjnej i mapowanie danych ze sterownika ruchu i PLC do systemu symulacyjnego
- Obs?uguje symulacj? systemu, w tym linie przeno?ników, wiele robotów i systemy materia?owe. Obs?uguje symulacje systemu, w tym linie przeno?ników, wiele robotów i systemy materia?owe.
Dzi?ki szybkiemu tworzeniu scenariuszy aplikacji i ??czeniu si? z odpowiednimi modu?ami komunikacyjnymi, iRobotCAM mo?e realizowa? scenariusze aplikacji wirtualnego debugowania robotów i cyfrowego bli?niaka.
O iRobotCAM :
Firma Yueqing Technology specjalizuje si? w opracowywaniu kompleksowych rozwi?zań do projektowania linii produkcyjnych, programowania robotów w trybie offline i wirtualnego debugowania.
Strona internetowa iRobotCAM: www.euromedic-care.com, e-mail: collaboration@iRobotCAM.com