?zet: Robot modelleme ve e?itim platformunun yüksek e?ik de?eri ve yüksek maliyeti sorunuyla kar?? kar??ya kalan Yueqing Technology, robot yaz?l?m?ndaki kendi endüstri teknolojisi avantajlar?ndan yararlanarak 3B geometri ?ekirde?ine dayal? robot modelleme modülünü piyasaya sürüyor, URDF arayüzünü geni?letiyor ve ROS robotlar?n?n simülasyonunu ve analizini a??yor.
Robot modelleme ve e?itim platformunun yüksek e?ik de?eri ve yüksek maliyeti sorunuyla kar?? kar??ya kalan Yueqing Technology, robot yaz?l?m?ndaki endüstri teknik avantajlar?ndan yararlanarak 3 boyutlu geometri ?ekirdek platformuna dayal? iRobotCAM robot modelleme modülünü piyasaya sürdü.
- iRobotCAM’in modelleme kabiliyetleri ve kendi geli?tirdi?i fizik motorunun kabiliyetleri sayesinde iRobotCAM, robot modellerini h?zl? bir ?ekilde olu?turup y?netebiliyor ve fiziksel simülasyonlar ger?ekle?tirebiliyor.
- Geni?letilmi? URDF i?e ve d??a aktarma arayüzleri sayesinde iRobotCAM, ROS robotlar?yla daha fazla ba?lant? kurarak, kullan?c?lar?n robot modellemesini ve robot simülasyonunu birbirine ba?layarak robotlar?n fiziksel modelini daha etkili bir ?ekilde e?itmelerine olanak tan?r.
A?a??da, iRobotCAM’in robot modelleme ve e?itim modelini ger?ekle?tirmek i?in nas?l kullan?laca??n? daha ayr?nt?l? olarak a??klamak amac?yla en basit endüstriyel robot ?rne?i ele al?nm??t?r:
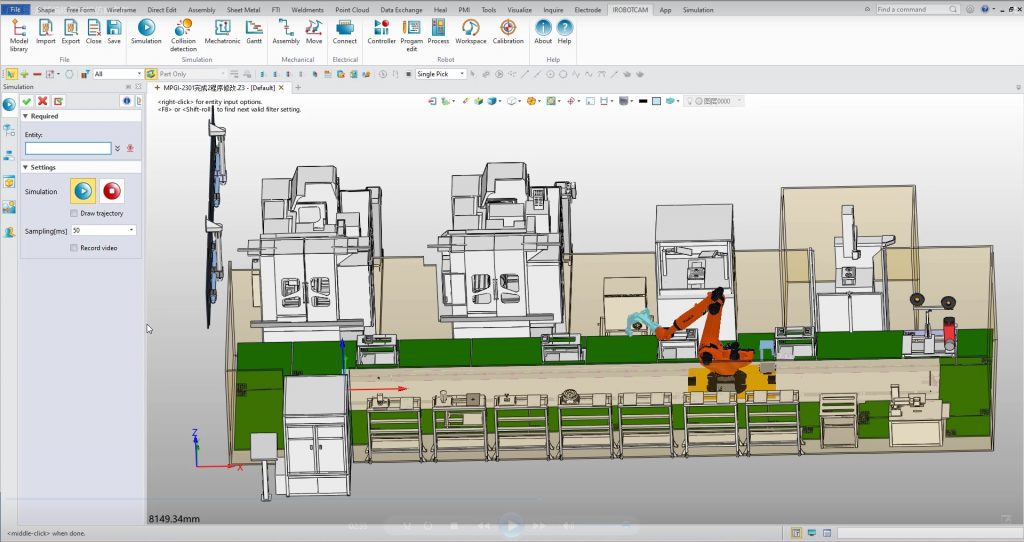
- Dijital 3D sahne modelleme
- iRobotCAM, 3D modelleme fonksiyonunu kullanarak karma??k 3D modeller olu?turabilir ve dijital sahnelerin modellemesini tamamlayabilir.
- Mevcut 3D modelleri yeniden kullanmak ve robot dijital sahne olu?turma verimlili?ini art?rmak i?in iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid ve di?er 3D formatlar?n?n i?e aktar?lmas?n? destekleyin.
- Mekatronik Tasar?m ve Robotik Kütüphanesi
- Sens?r veri ortam?n?n kurulmas?: Siemens, Mitsubishi, Inovance ve di?er markalar dahil olmak üzere PLC sinyal sistemlerini destekler ve daha fazla sinyal eri?im cihaz?n?n ?zelle?tirilmesini destekler
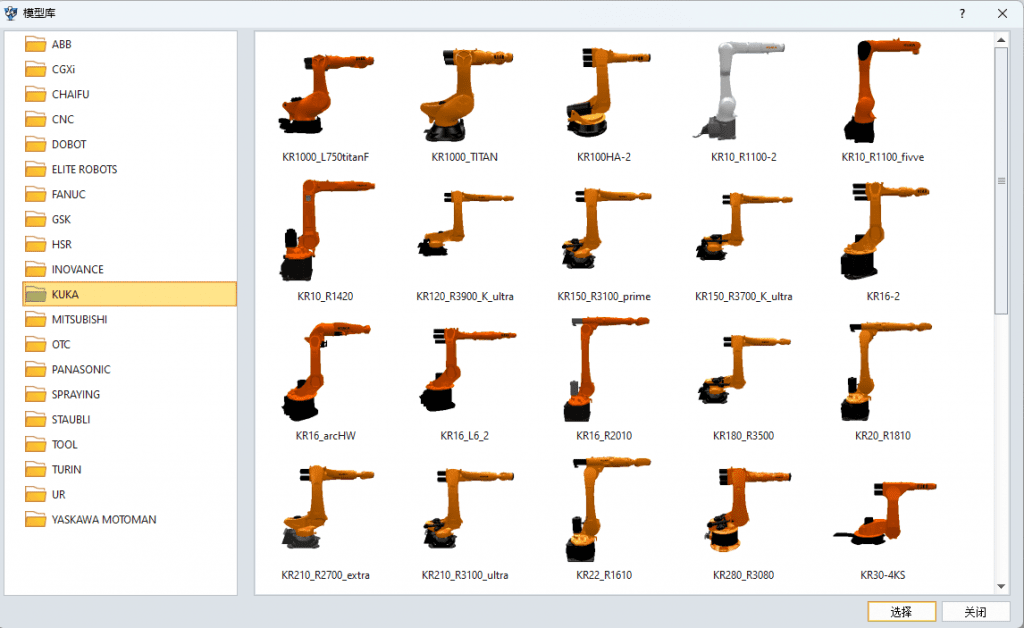
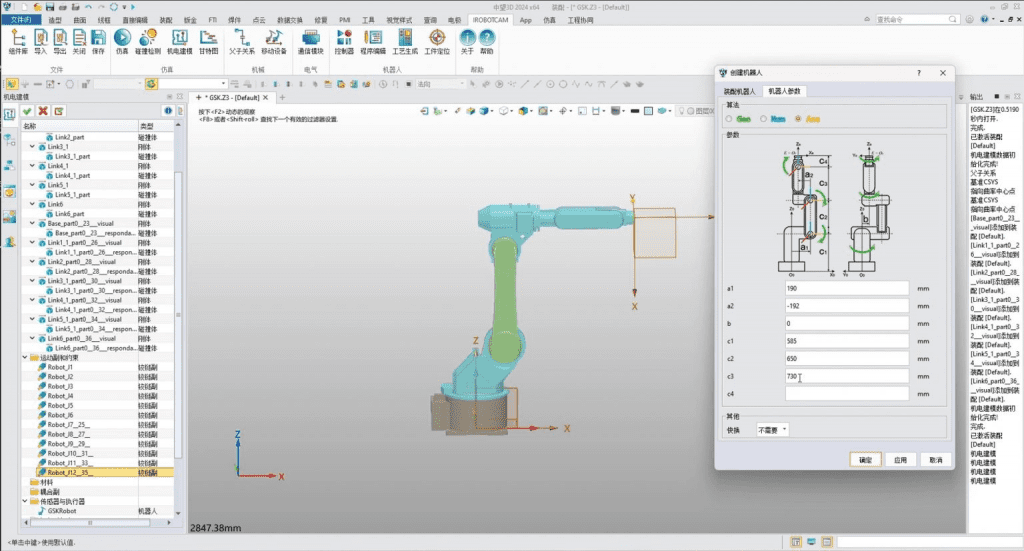
- Robot kütüphanesinin kurulmas?: Endüstriyel robotlar i?in, robot simülasyon modelleri kurmak i?in ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO ve Turing dahil g?mülü robot kütüphanelerini kullanabilir veya robot ?zelle?tirme i?levleri arac?l???yla kendi robot kütüphanenizi kurabilirsiniz. ?nsans? veya tekerlekli robotlar i?in, ilgili par?alar?n ayr?nt?l? eklem bilgileri gerekti?i gibi kurulabilir ve genel eklem tan?m?, ?arp??ma tespiti vb., eksiksiz bir insans? veya tekerlekli ?zel robot kütüphanesi olu?turmak i?in olu?turulabilir.
- Robot e?itimi
- Robot y?rünge planlama modelinin kurulmas?: ?oklu makine IO ileti?im simülasyonunu, ?oklu robot senkronizasyonunu ve robot ?ok eksenli ba?lant? planlamas?n? destekler;
- Robotlar Taraf?ndan E?itilen Fiziksel Modellerin E?itimi: Engellerden ka??nma gereksinimleri, ?arp??ma analizi ve di?er veri modelleri de dahil olmak üzere kendi fizik motorunu kullanarak fiziksel ?zelliklerin simülasyonunu destekler ve belirli senaryolarda robotlar?n e?itim algoritmalar?n? desteklemek i?in ü?üncü taraf arayüzlerinin geni?letilmesini destekler.
- Ortak hata ay?klamay? sa?lamak i?in ROS robotlar?yla veri yerle?tirme
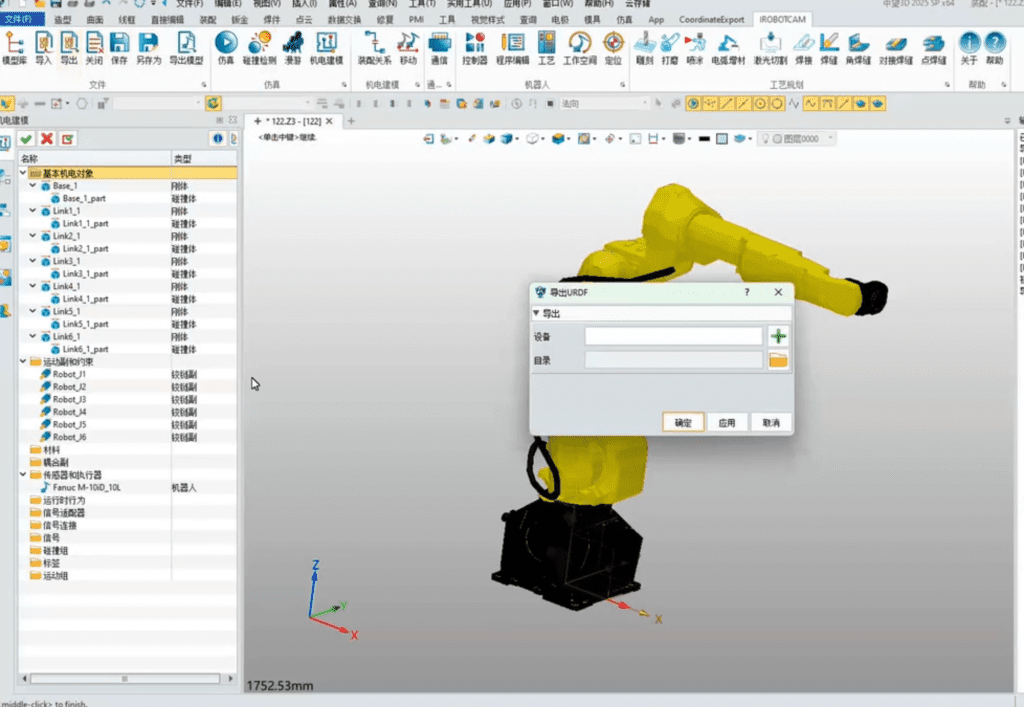
- iRobotCAM taraf?ndan tamamlanan robot optimizasyon modeli, ROS robotlar?n?n daha ileri simülasyonu ve yürütülmesi i?in URDF’ye aktar?labilir
- URDF’nin i?e aktarma fonksiyonu ile robot temel modeli iRobotCAM’e aktar?labilir ve robot veri ortam?, robotun veri modelinin tasar?m hedeflerine uyacak ?ekilde iRobotCAM üzerinde daha fazla de?i?tirilebilir ve e?itilebilir.
Yueqing Teknolojisi Hakk?nda
Yueqing Technology, üretim hatlar?n?n elektromekanik kavramsal tasar?m?n?, robot i?leme programlama simülasyonunu ve sanal hata ay?klamay? birle?tiren dijital bir ??züm olan a??k bir iRobotCAM robot ?evrimd??? programlama platformu olu?turmaya kendini adam??t?r.
iRobotCAM web sitesi: www.euromedic-care.com; ?leti?im: collaboration@iRobotCAM.com