Streszczenie: Yueqing Technology opublikowa? dokument techniczny na temat programowania i symulacji obróbki laserowej, w którym opisano trudno?ci zwi?zane z precyzyjn? kontrol? zastosowań technologii obróbki laserowej, a tak?e omówiono schemat trajektorii i symulacji obróbki laserowej, sposób efektywnego wykorzystania iRobotCAM do ukończenia obróbki laserowej i symulacji oraz znacznej poprawy rozwoju sprz?tu scenariuszy zastosowań procesów laserowych i wydajno?ci zastosowań procesów laserowych.
- Przegl?d bran?y laserowej
Bran?a laserowa ma ogromn? skal? zatrudnienia i wielko?? przysz?ego rynku, a bran?a ta znajduje si? w okresie szybkiego rozwoju.
- Charakterystyka technologii laserowej
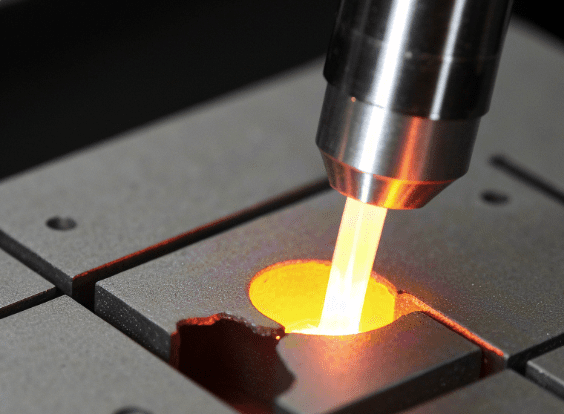
Najwi?ksz? cech? procesu laserowego jest wysoka precyzja. Aby lepiej zrozumie? zastosowanie technologii laserowej, zaczynamy od scenariusza wyposa?enia zastosowania technologii laserowej i traktujemy rozwój i zastosowanie obrabiarek laserowych i zastosowań obróbki laserowej robotów jako typowe zastosowania, aby dalej analizowa? jego trudno?ci i dalej wyja?nia? rozwi?zania.
Rozwój i zastosowanie obrabiarek laserowych
Rozpoczynaj?c od procesu rozwoju sprz?tu obrabiarek laserowych, mo?emy dalej zrozumie? trudno?ci i rozwi?zania zastosowania technologii laserowej w obrabiarkach.
Proces rozwoju obrabiarki laserowej: modelowanie struktury 3D < modelowanie elektromechaniczne i symulacja ruchu < generowanie trajektorii i wirtualne debugowanie < symulacja post-processingu i przetwarzania
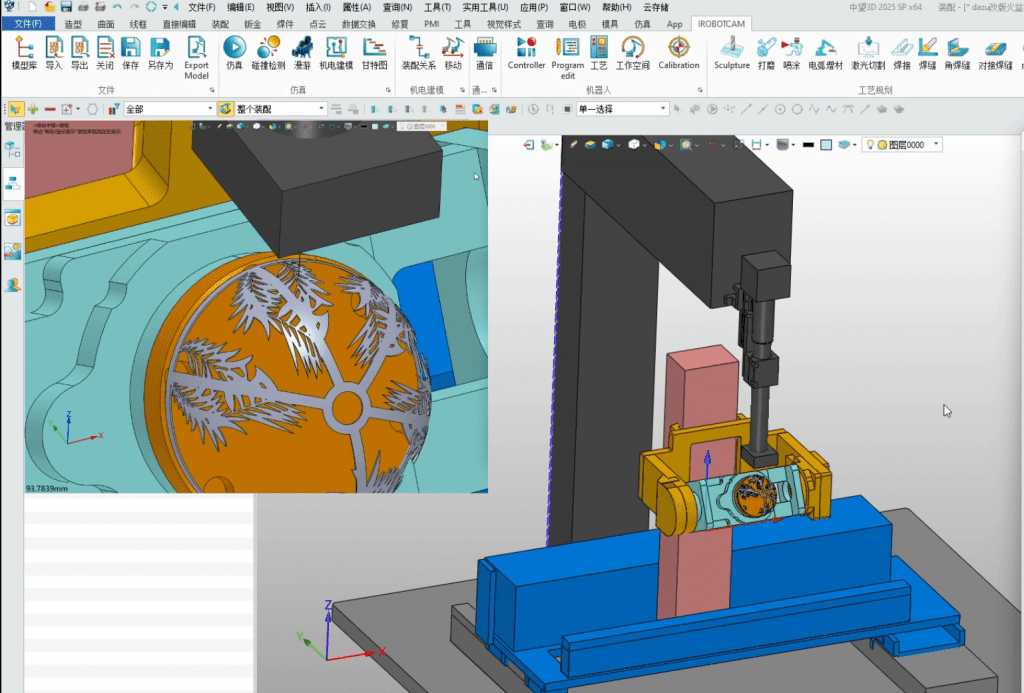
Poni?ej wykorzystano iRobotCAM jako rozwi?zanie programowe do rozwoju i debugowania obrabiarki laserowej, aby wyja?ni?, jak krok po kroku wdro?y? rozwój obrabiarki laserowej i wirtualne debugowanie oraz zrealizowa? masow? produkcj? i zastosowanie obrabiarek laserowych.
1) Modelowanie struktury 3D: iRobotCAM wykorzystuje cechy platformy 3D CAD do szybkiego zbudowania cyfrowego modelu struktury 3D obrabiarki.
2) Modelowanie elektromechaniczne i symulacja ruchu: iRobotCAM ma modu? modelowania elektromechanicznego, który mo?e by? u?ywany do modelowania i projektowania linii produkcyjnych oraz wirtualnego debugowania robotów. Przed faktyczn? produkcj? proces obróbki laserowej mo?na symulowa? w ?rodowisku wirtualnym, aby odkry? i rozwi?za? mo?liwe problemy z wyprzedzeniem, takie jak interferencja kolizji ruchu robota, sprawdzanie osobliwo?ci robota, osi?galno?ci i kolizji oraz b??dy ?cie?ki lasera itp., aby zmniejszy? b??dy i ryzyko w rzeczywistym debugowaniu oraz poprawi? wydajno?? i bezpieczeństwo produkcji.
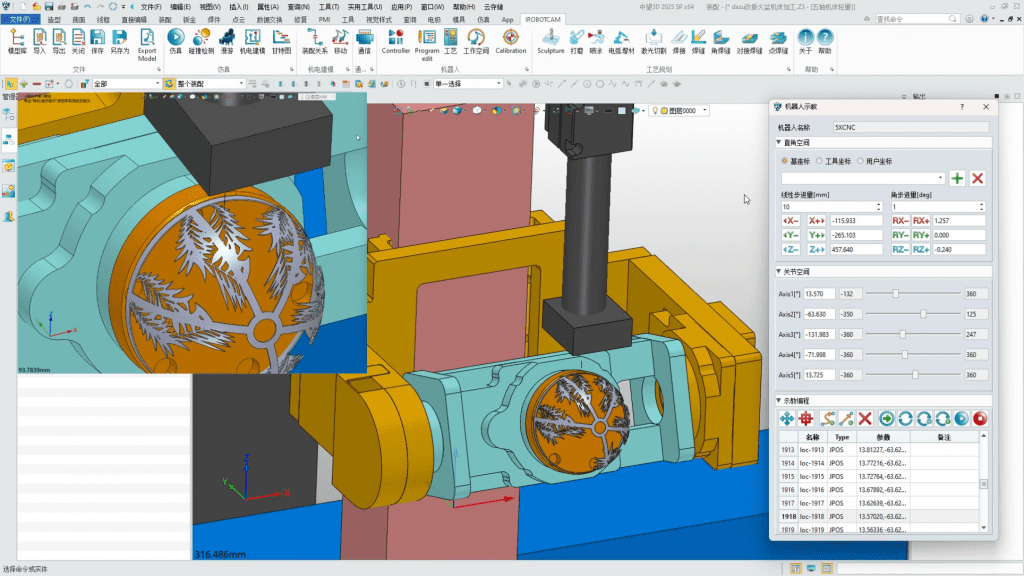
3) Generowanie trajektorii i wirtualne debugowanie: Opracowane na bazie platformy ZW3D, mo?e wykorzystywa? ró?ne algorytmy trajektorii ZW3D (od 2 do 5 osi), dzi?ki czemu robot dysponuje dok?adnymi algorytmami trajektorii podobnymi do oprogramowania CAM podczas procesu obróbki laserowej i mo?e dok?adnie skupi? wi?zk? lasera na obrabianej cz??ci, realizuj?c precyzyjne ci?cie laserowe, spawanie, grawerowanie i inne procesy, zapewniaj?c jako?? i spójno?? obróbki.
4). Postprocessing i symulacja obróbki: wygodny modu? postprocessingu iRobotCAM mo?e szybko generowa? kod i intuicyjnie wy?wietla? efekty symulacji obróbki
Przyjrzyjmy si?, jak iRobotCAM wykorzystuje 5-osiowe obrabiarki do obróbki laserowej i symulacji:
- Zastosowanie technologii laserowej robota
Technologia laserowa robota jest g?ównie wysoce precyzyjna, a mo?liwo?? osi?gni?cia wysoce precyzyjnej produkcji przy u?yciu laserów stanowi podstaw? dla ró?nych bran?, takich jak przemys? lotniczy, samochodowy i maszynowy, w celu uzyskania sprz?tu o wysokiej wydajno?ci lub wysokiej precyzji. Je?li chodzi o przemys? robotyczny, jakie s? trudno?ci w zastosowaniu technologii laserowej? Jak szybko zrealizowa? zastosowanie technologii laserowej robota?
Po pierwsze, w przypadku technologii obróbki laserowej robota ogólny proces wygl?da nast?puj?co:
Import robota i przedmiotu obrabianego> Pozycjonowanie przedmiotu obrabianego i kalibracja robota> Realizacja programowania trajektorii> Symulacja ca?ej sceny> Wyj?cie kodu i przetwarzanie robota
Z powy?szego procesu mo?na wywnioskowa?, ?e nacisk technologii laserowej po?o?ony jest na ustanowienie ?rodowiska cyfrowego oraz wyj?cie i symulacj? kodu. We?my oprogramowanie do programowania offline iRobotCAM jako przyk?ad, aby wyja?ni?, jak u?ywa? iRobotCAM w celu osi?gni?cia wydajnego zastosowania technologii laserowej robota.
1) . Wykorzystuj?c iRobotCAM, który opiera si? na mo?liwo?ciach platformy CAD 3D, mo?na szybko modelowa? digitalizacj? sprz?tu i procesów
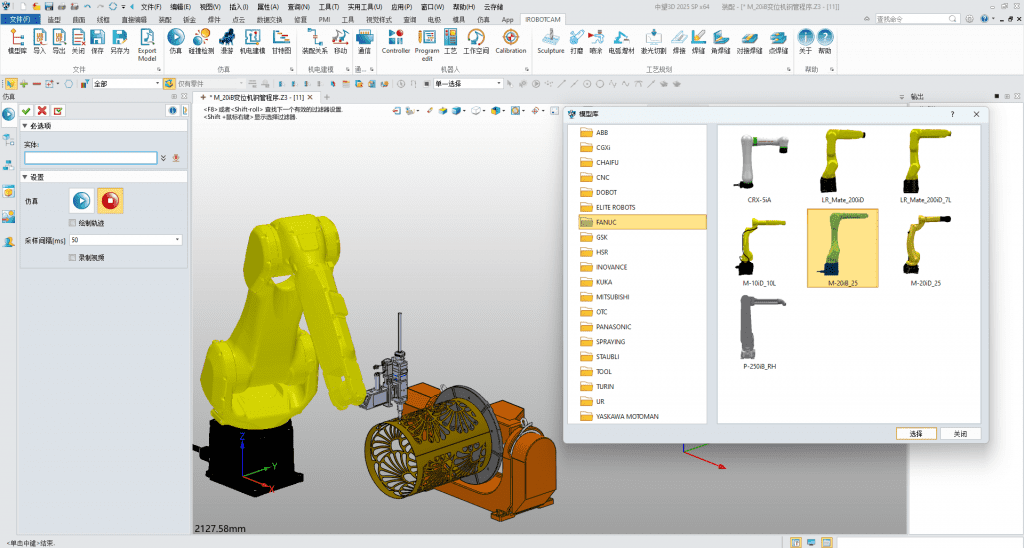
2) Korzystaj?c z biblioteki maszyn iRobotCAM, mo?esz szybko budowa? roboty lub narz?dzia zwi?zane z zastosowaniami laserowymi, unikaj?c konieczno?ci wielokrotnego budowania podstawowych bibliotek cz??ci w przysz?o?ci i pomagaj?c firmom efektywniej wykorzystywa? modele cyfrowe.
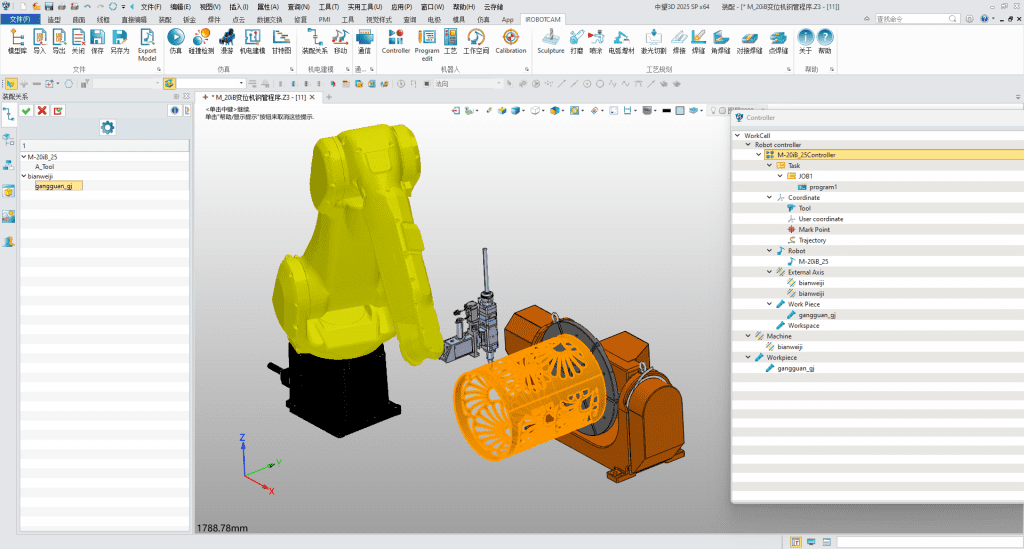
3). Wykorzystuj?c unikaln? funkcj? pozycjonowania iRobotCAM, przedmiot obrabiany mo?na szybko i dok?adnie ustawi? zgodnie z wymaganiami obróbki laserowej. Dok?adniej rzecz bior?c, iRobotCAM mo?e osi?gn?? pozycjonowanie przedmiotu obrabianego w ró?nych warunkach roboczych w oparciu o funkcje CAD przedmiotu obrabianego.
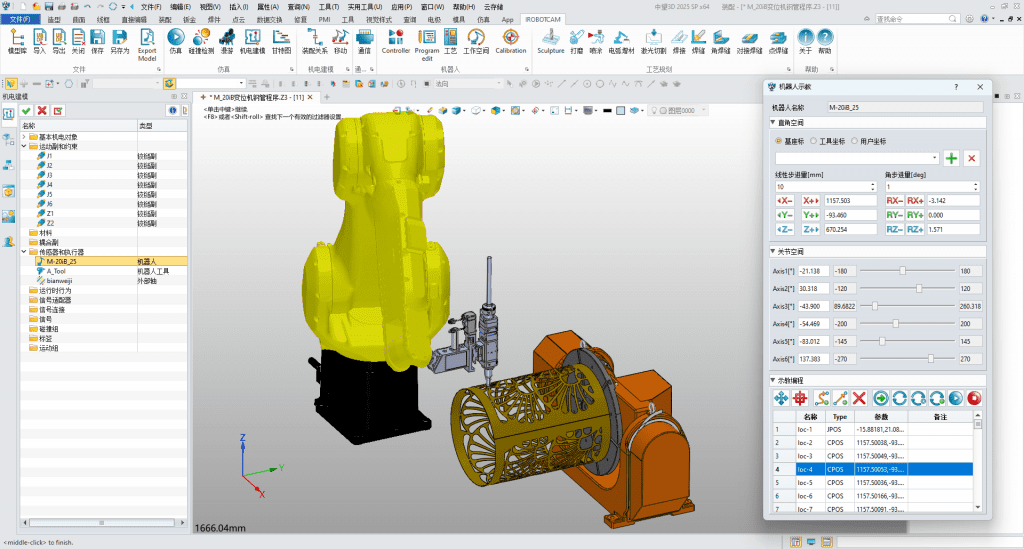
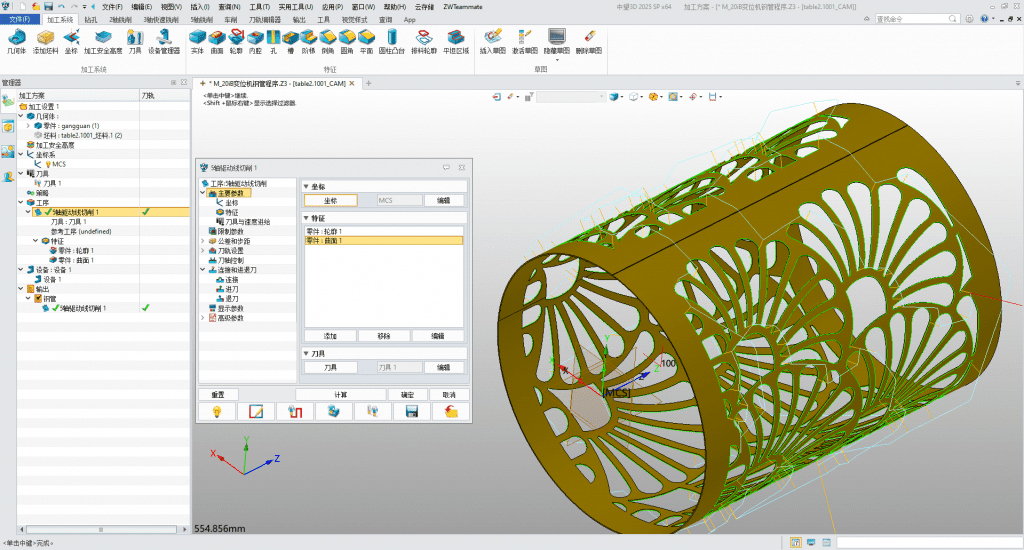
4) Wykorzystuj?c mo?liwo?ci generowania trajektorii w iRobotCAM, mo?liwe jest generowanie z?o?onych trajektorii wieloosiowych na zakrzywionych powierzchniach i realizacja zastosowań procesów laserowych dla robotów z wi?cej ni? 7 osiami.
5). Mo?liwo?ci wirtualnego debugowania robotów iRobotCAM mo?na wykorzysta? do programowania scen laserowych robotów i wirtualnej symulacji, a tak?e do efektywnej kontroli wp?ywu technologii robotów na aplikacj?.
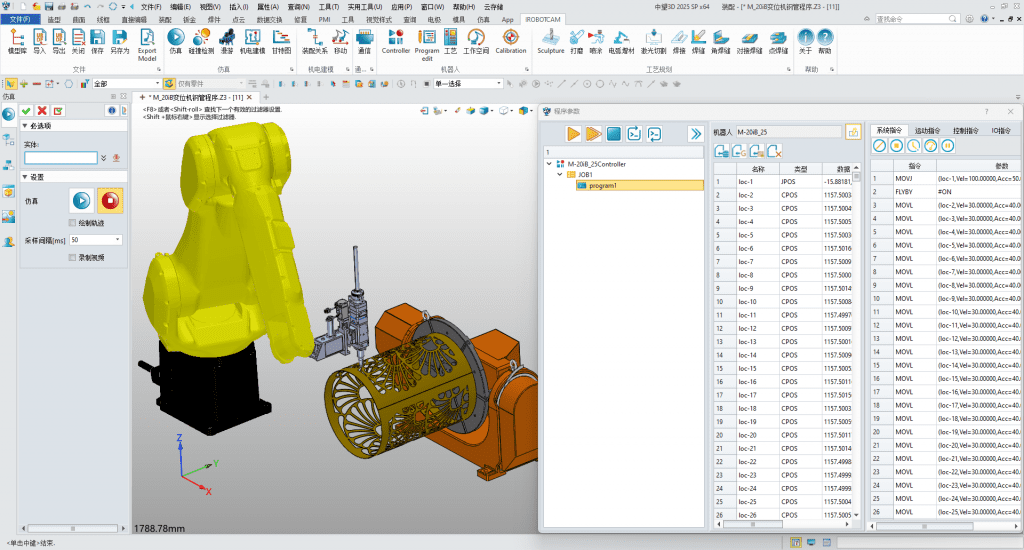
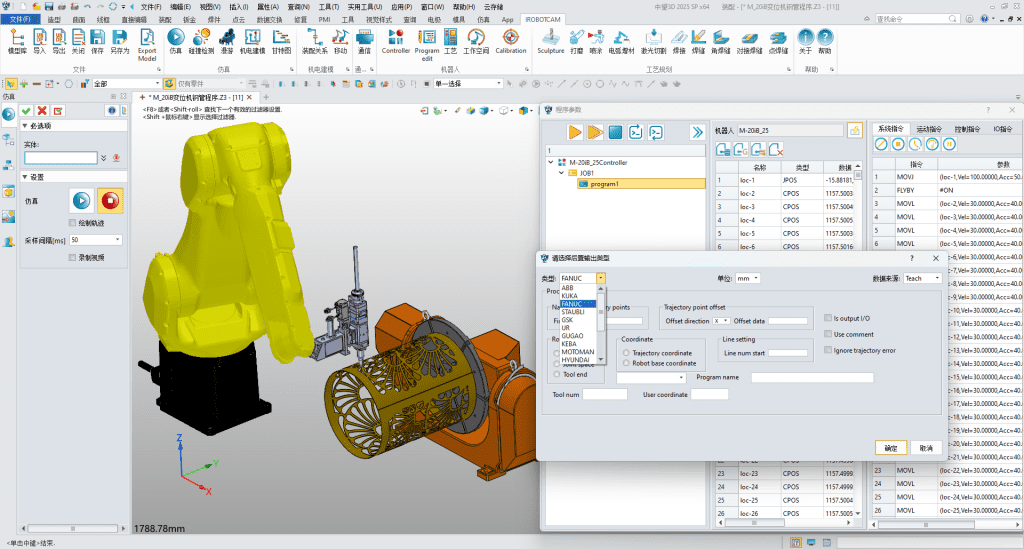
6). Wykorzystuj?c mo?liwo?ci przetwarzania końcowego iRobotCAM, mo?na sprawnie dostosowa? si? do ró?nych typów robotów, w tym FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin itp. i sprawnie u?ywa? jednego zestawu oprogramowania do zarz?dzania wieloma markami lub wieloma urz?dzeniami.
Nast?pnie przyjrzyjmy si?, w jaki sposób iRobotCAM wykorzystuje roboty do przetwarzania 5-osiowego wzoru pustego. Dzi?ki elastycznym mo?liwo?ciom programowania iRobotCAM mo?na uzyska? generowanie trajektorii 5-osiowej i szybk? symulacj? robota.
- Podsumowanie
Podstawowym punktem zastosowania technologii laserowej jest precyzja, która wymaga programowania i symulacji, aby uzyska? projekt architektury o wysokiej precyzji. Poprzez powy?sze typowe przypadki zastosowań 5-osiowej maszyny do obróbki laserowej i scenariusze zastosowań wieloosiowej obróbki laserowej robota mo?na zauwa?y?, ?e wybór iRobotCAM jako rozwi?zania do obróbki laserowej i wirtualnego debugowania mo?e skutecznie rozwi?za? podstawowy problem wysokiej precyzji obróbki laserowej. I dalsza ekspansja, jako zastosowanie procesu obróbki laserowej, iRobotCAM mo?e dalej rozszerza? swoje zastosowanie w wi?kszej liczbie scenariuszy, w tym ci?ciu laserowym, napawaniu laserowym, zastosowaniach wytwarzania addytywnego ?ukiem elektrycznym itp. ze wzgl?du na otwarto?? swojej architektury technicznej i odzwierciedla? swoje oczywiste zalety techniczne o wysokiej precyzji.
O technologii Yueqing
Yueqing Technology stawia sobie za cel zbudowanie otwartej platformy do programowania robotów offline iRobotCAM. Platforma ta jest cyfrowym rozwi?zaniem integruj?cym elektromechaniczny projekt koncepcyjny linii produkcyjnych, symulacj? programowania przetwarzania robotów oraz wirtualne debugowanie.
iRobotCAM website: www.euromedic-care.com; Contact: cooperation@iRobotCAM.com