Streszczenie: W obliczu problemu wysokiego progu i wysokich kosztów platformy do modelowania i szkolenia robotów, Yueqing Technology wykorzystuje w?asne zalety technologiczne w bran?y oprogramowania robotów, aby wypu?ci? modu? modelowania robotów oparty na j?drze geometrii 3D, rozszerzy? interfejs URDF i otworzy? symulacj? i analiz? robotów ROS.
W obliczu problemu wysokiego progu i wysokich kosztów platformy do modelowania i szkolenia robotów, Yueqing Technology wykorzysta?o swoje zalety techniczne w bran?y oprogramowania robotów, aby wypu?ci? modu? modelowania robotów iRobotCAM oparty na platformie j?dra geometrii 3D.
- Dzi?ki mo?liwo?ciom modelowania iRobotCAM i mo?liwo?ciom samodzielnie opracowanego silnika fizycznego, iRobotCAM mo?e szybko tworzy? i zarz?dza? modelami robotów oraz przeprowadza? symulacje fizyczne.
- Dzi?ki rozszerzonym interfejsom importu i eksportu URDF, iRobotCAM ??czy si? dalej z robotami ROS, umo?liwiaj?c u?ytkownikom ??czenie modelowania robotów i symulacji robotów w celu skuteczniejszego trenowania fizycznego modelu robotów.
Poni?ej przedstawiono najprostszy przyk?ad robota przemys?owego, aby lepiej zrozumie?, jak u?ywa? iRobotCAM do realizacji modelu modelowania i szkolenia robota:
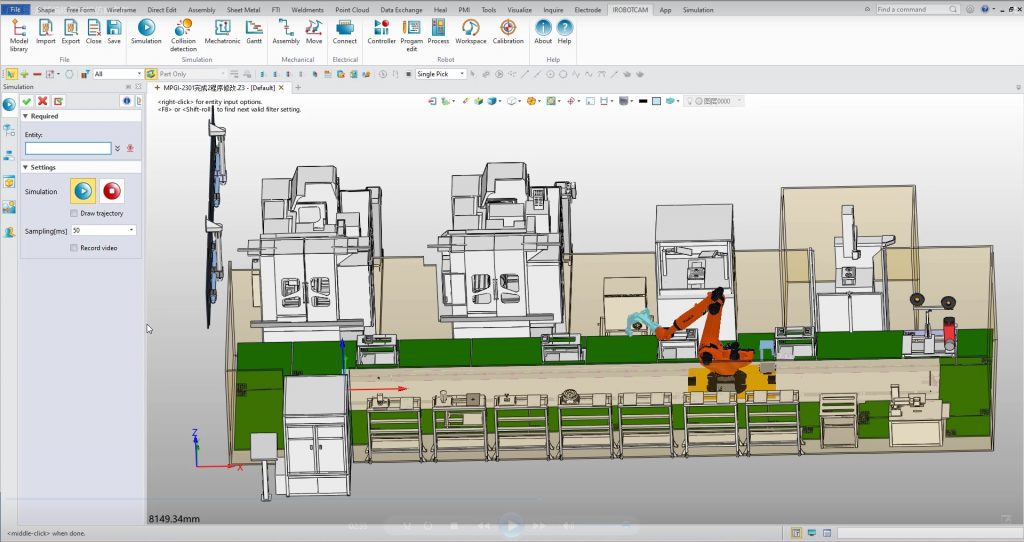
- Cyfrowe modelowanie scen 3D
- Korzystaj?c z funkcji modelowania 3D, iRobotCAM mo?e budowa? z?o?one modele 3D i kończy? modelowanie scen cyfrowych.
- Obs?uguje import iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid i innych formatów 3D, aby ponownie wykorzysta? istniej?ce modele 3D i zwi?kszy? wydajno?? konstrukcji scen cyfrowych robotów.
- Biblioteka projektowania mechatronicznego i robotyki
- Ustanowienie ?rodowiska danych czujników: obs?uga systemów sygna?owych PLC, w tym Siemens, Mitsubishi, Inovance i innych marek, oraz obs?uga dostosowywania wi?kszej liczby urz?dzeń dost?pu do sygna?u
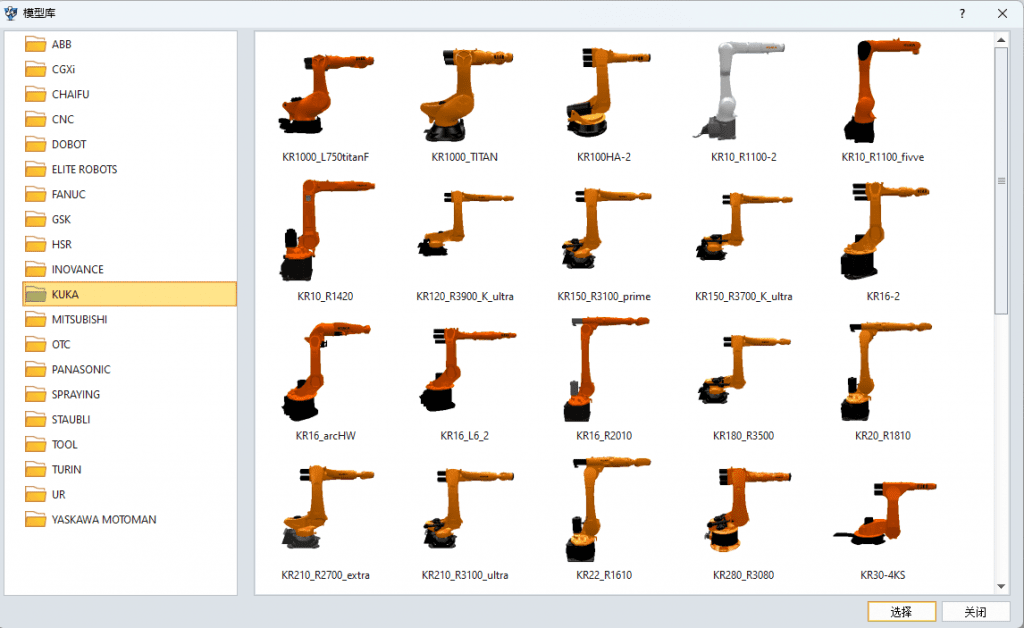
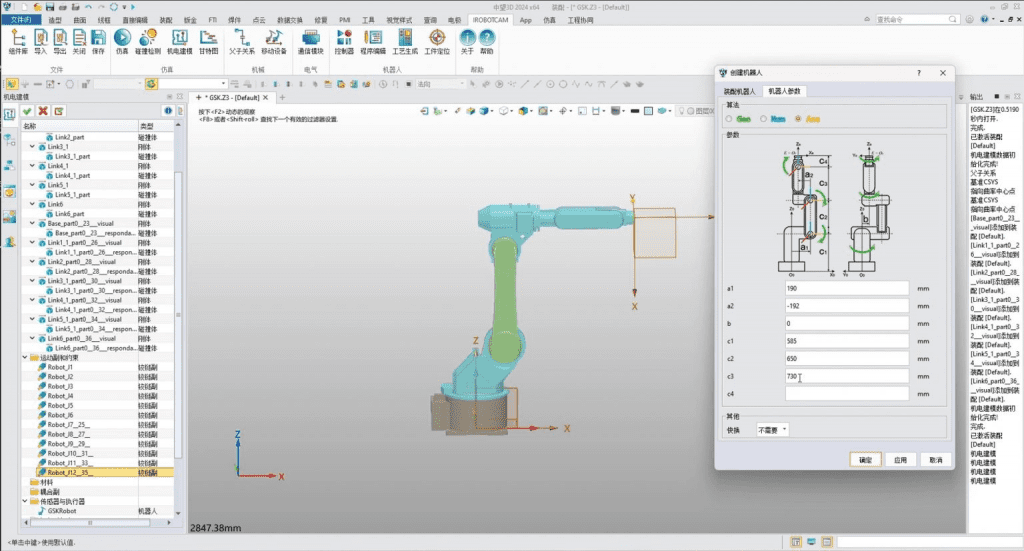
- Ustanowienie biblioteki robotów: W przypadku robotów przemys?owych mo?na u?y? wbudowanych bibliotek robotów, w tym ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO i Turing, aby ustanowi? modele symulacji robotów lub utworzy? w?asn? bibliotek? robotów za pomoc? funkcji dostosowywania robotów. W przypadku robotów humanoidalnych lub ko?owych szczegó?owe informacje o stawach odpowiednich cz??ci mo?na ustali? w razie potrzeby, a ogóln? definicj? stawu, wykrywanie kolizji itp. mo?na utworzy? w celu utworzenia kompletnej biblioteki robotów humanoidalnych lub ko?owych.
- Szkolenie robotów
- Ustanowienie modelu planowania trajektorii robota: obs?uga symulacji komunikacji IO wielu maszyn, synchronizacji wielu robotów i planowania po??czeń wieloosiowych robotów;
- Szkolenie modeli fizycznych szkolonych przez roboty: obs?uguje symulacj? cech fizycznych przy u?yciu w?asnego silnika fizycznego, w tym wymagań dotycz?cych unikania przeszkód, analizy kolizji i innych modeli danych, a tak?e obs?uguje rozbudow? interfejsów stron trzecich w celu obs?ugi algorytmów szkoleniowych robotów w okre?lonych scenariuszach.
- Dokowanie danych z robotami ROS w celu umo?liwienia wspólnego debugowania
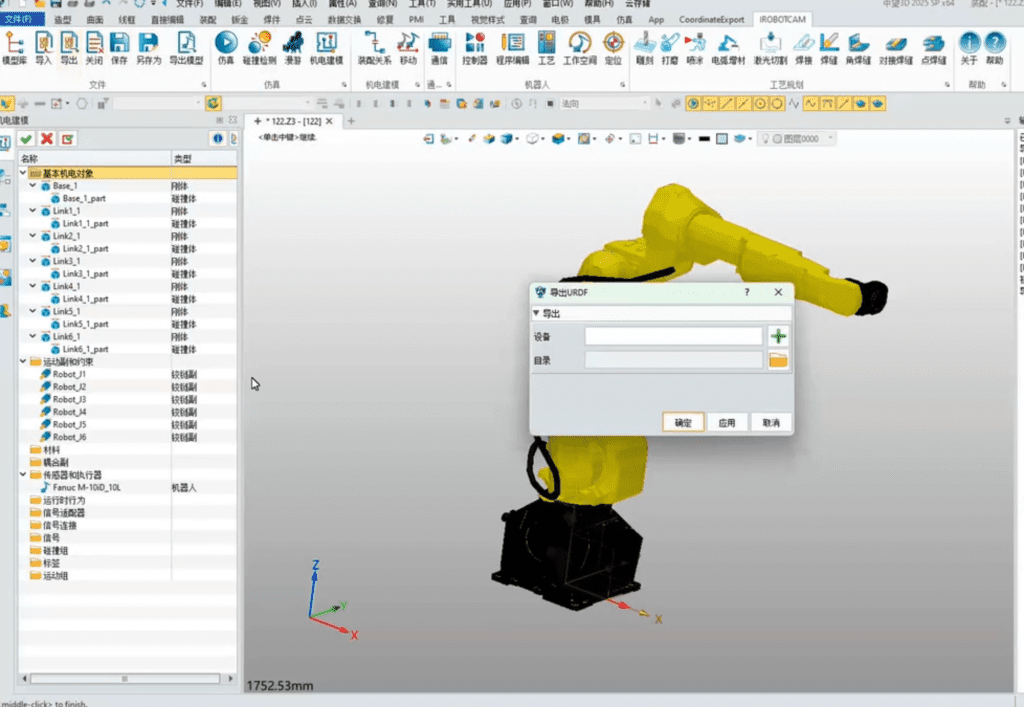
- Model optymalizacji robota ukończony przez iRobotCAM mo?na wyeksportowa? do URDF w celu dalszej symulacji i wykonania robotów ROS
- Dzi?ki funkcji importu URDF model bazowy robota mo?na zaimportowa? do iRobotCAM, a ?rodowisko danych robota mo?na dalej modyfikowa? i szkoli? w iRobotCAM, aby spe?ni? cele projektowe modelu danych robota.
O technologii Yueqing
Yueqing Technology stawia sobie za cel zbudowanie otwartej platformy do programowania robotów offline iRobotCAM. Platforma ta jest cyfrowym rozwi?zaniem integruj?cym elektromechaniczny projekt koncepcyjny linii produkcyjnych, symulacj? programowania przetwarzania robotów oraz wirtualne debugowanie.
iRobotCAM website: www.euromedic-care.com; Contact: cooperation@iRobotCAM.com