概要:越擎科技發(fā)布激光加工編程與仿真技術(shù)白皮書,闡述激光加工工藝應(yīng)用的高精度控制等難點(diǎn),并進(jìn)一步探討激光加工的軌跡及仿真方案,如何有效的使用iRobotCAM來完成激光加工及仿真,大大的提升激光工藝應(yīng)用場(chǎng)景的設(shè)備開發(fā)及激光工藝應(yīng)用效率。
一,激光行業(yè)的概況
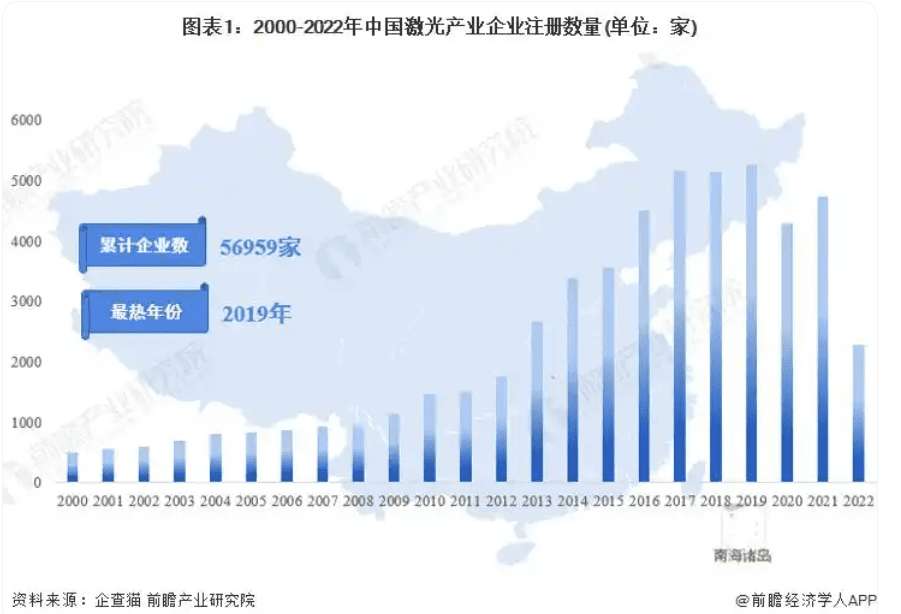
激光行業(yè)的從業(yè)規(guī)模與未來的市場(chǎng)規(guī)模巨大,行業(yè)處于快速發(fā)展期。
- 根據(jù)中國(guó)企業(yè)數(shù)據(jù)庫(kù)企查貓,目前中國(guó)激光產(chǎn)業(yè)行業(yè)的主要企業(yè)共有56959家,其中以2017-2019年為主要注冊(cè)熱潮,2017-2019年三年新增注冊(cè)企業(yè)超五千家。2021年注冊(cè)企業(yè)數(shù)量為4737家,而2022年則為2284家。
2. 據(jù)前瞻產(chǎn)業(yè)研究院的數(shù)據(jù)調(diào)研,中國(guó)激光市場(chǎng)結(jié)構(gòu)主要分為激光加工設(shè)備、光通信器件與設(shè)備、激光測(cè)量設(shè)備、激光器、激光醫(yī)療設(shè)備、激光元器件等。中國(guó)激光加工設(shè)備市場(chǎng)占據(jù)激光產(chǎn)業(yè)最大市場(chǎng)份額,發(fā)展速度最快,未來市場(chǎng)發(fā)展空間也最大。根據(jù)2022年中國(guó)激光元器件、激光器、激光加工設(shè)備市場(chǎng)規(guī)模,2022年中國(guó)激光產(chǎn)業(yè)整體市場(chǎng)規(guī)模已達(dá)2186億元。

二,激光工藝的特性
激光的最大的工藝特性是高精度,為了進(jìn)一步理解激光工藝的應(yīng)用,從激光工藝的應(yīng)用的設(shè)備場(chǎng)景入手,以激光機(jī)床的開發(fā)與應(yīng)用以及機(jī)器人激光加工應(yīng)用作為應(yīng)用的典型進(jìn)一步分析其難點(diǎn)及進(jìn)一步闡述解決方案。
三,激光機(jī)床的開發(fā)與應(yīng)用
從激光機(jī)床的設(shè)備開發(fā)流程著手,可以進(jìn)一步了解激光工藝在機(jī)床上的應(yīng)用難點(diǎn)及解決方案。
- 激光機(jī)床開發(fā)流程:三維結(jié)構(gòu)建模< 機(jī)電建模與運(yùn)動(dòng)仿真< 軌跡生成與虛擬調(diào)試< 后置處理與加工仿真
下面以iRobotCAM作為激光機(jī)床開發(fā)與調(diào)試的軟件方案,闡述如何一步步的實(shí)現(xiàn)激光機(jī)床的開發(fā)與虛擬調(diào)試,并實(shí)現(xiàn)激光機(jī)床的量產(chǎn)與應(yīng)用。
- 三維結(jié)構(gòu)建模:利用iRobotCAM基于三維 CAD平臺(tái)中望3D的特性,可以快速的建立機(jī)床的三維結(jié)構(gòu)的數(shù)字化模型
2. 機(jī)電建模與運(yùn)動(dòng)仿真:iRobotCAM具備機(jī)電建模模塊,可進(jìn)行產(chǎn)線的建模設(shè)計(jì)和機(jī)器人的虛擬調(diào)試,在實(shí)際生產(chǎn)前通過虛擬環(huán)境模擬激光加工過程,提前發(fā)現(xiàn)并解決可能出現(xiàn)的問題,如機(jī)器人運(yùn)動(dòng)碰撞干涉、檢查機(jī)器人奇異性、可達(dá)性和碰撞性以及激光路徑錯(cuò)誤等,減少實(shí)際調(diào)試中的錯(cuò)誤和風(fēng)險(xiǎn),提高生產(chǎn)效率和安全性。
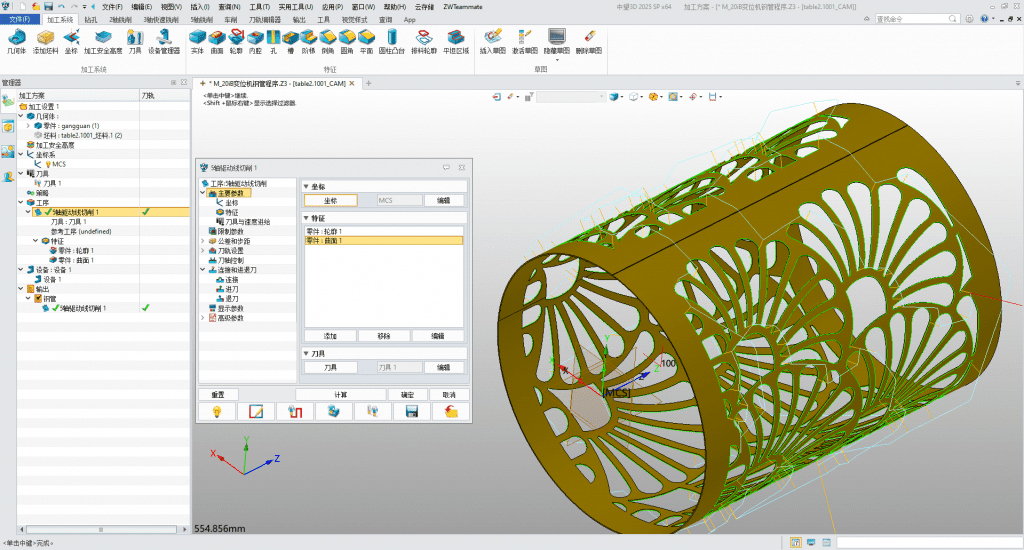
3. 軌跡生成與虛擬調(diào)試:基于中望3D平臺(tái)開發(fā),能夠利用中望3D的各類2軸到5軸的軌跡算法,使機(jī)器人在激光加工過程中擁有類似CAM軟件的精確軌跡算法,可將激光束準(zhǔn)確地聚焦在加工部位,實(shí)現(xiàn)高精度的激光切割、焊接、雕刻等工藝,確保加工質(zhì)量和一致性。
4. 后置處理與加工仿真:基于iRobotCAM的便捷的后置處理模塊,可以快速的生成代碼,并直觀的展示加工的仿真效果。
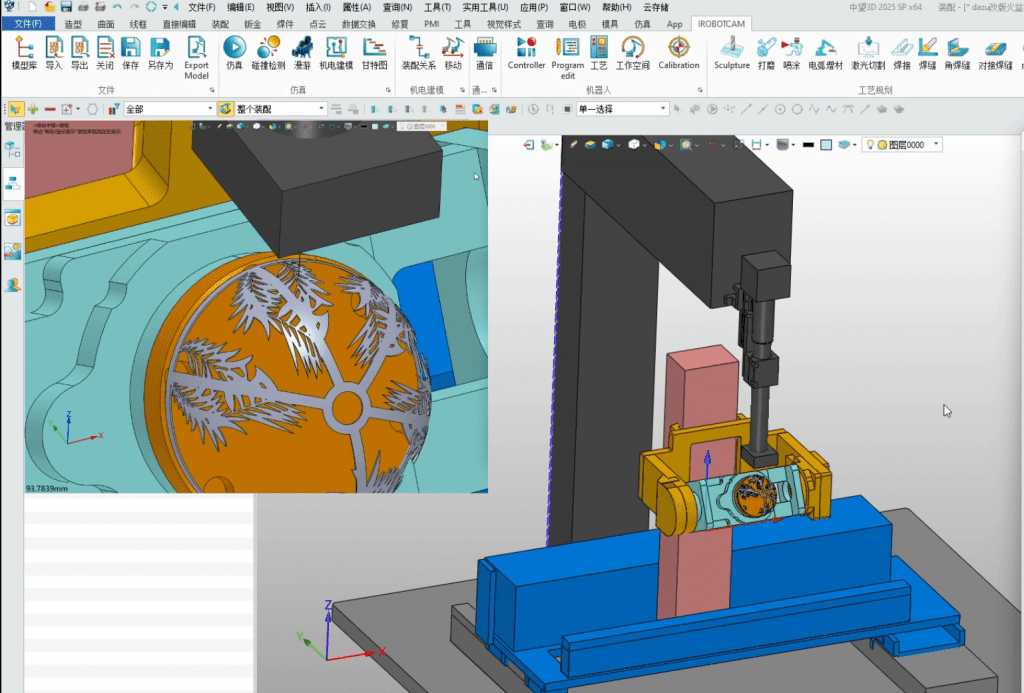
下面我們看一下iRobotCAM如何利用5軸機(jī)床實(shí)現(xiàn)加工的激光加工與仿真:
四,機(jī)器人的激光工藝的應(yīng)用
機(jī)器人激光的工藝主要在于高精度,而利用激光實(shí)現(xiàn)高精度的制造能力是航天,汽車,機(jī)械等各個(gè)行業(yè)實(shí)現(xiàn)高性能或高精度設(shè)備的基礎(chǔ),而作為機(jī)器人行業(yè)而言,激光工藝的應(yīng)用有何難點(diǎn),如何快速的實(shí)現(xiàn)機(jī)器人激光工藝的應(yīng)用呢?
首先,對(duì)于機(jī)器人激光加工工藝,一般流程如下:
導(dǎo)入機(jī)器人及工件> 工件的定位與機(jī)器人標(biāo)定>實(shí)現(xiàn)軌跡編程> 全場(chǎng)景的仿真> 代碼輸出及機(jī)器人加工
從以上流程可以看出,激光工藝的重點(diǎn)在于數(shù)字化環(huán)境的建立以及代碼的輸出與仿真, 我們以iRobotCAM離線編程軟件為例,闡述一下,如何利用iRobotCAM來實(shí)現(xiàn)機(jī)器人激光工藝的高效應(yīng)用。
- 利用iRobotCAM其基于國(guó)產(chǎn)三維CAD 中望3D內(nèi)核的能力,可以快速的建模完成設(shè)備及工藝的數(shù)字化
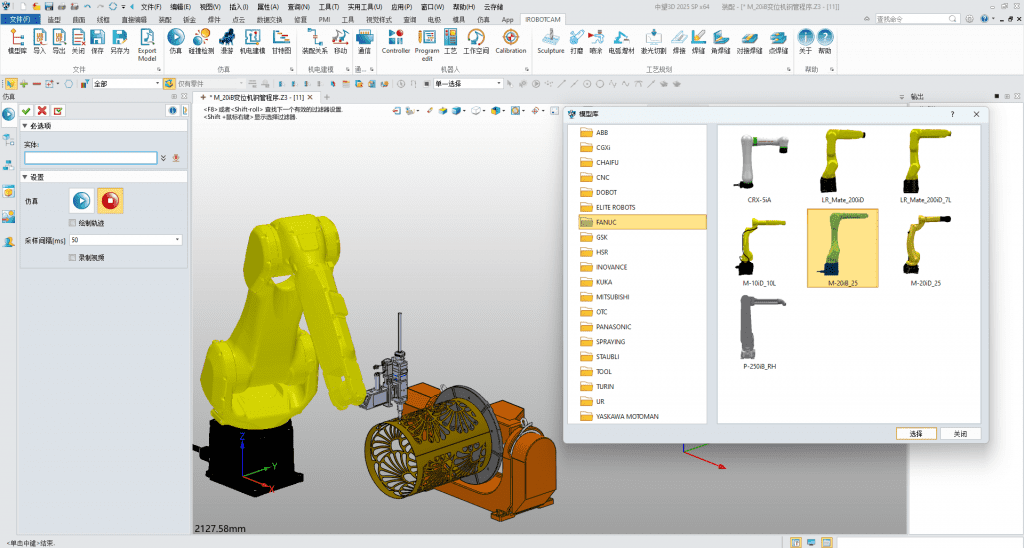
2. 利用iRobotCAM的機(jī)器庫(kù),可以快速的建立涉及到激光應(yīng)用的相關(guān)的機(jī)器人或工具,避免未來重復(fù)的建立基本零件庫(kù), 有助于企業(yè)高效的使用數(shù)字化模型
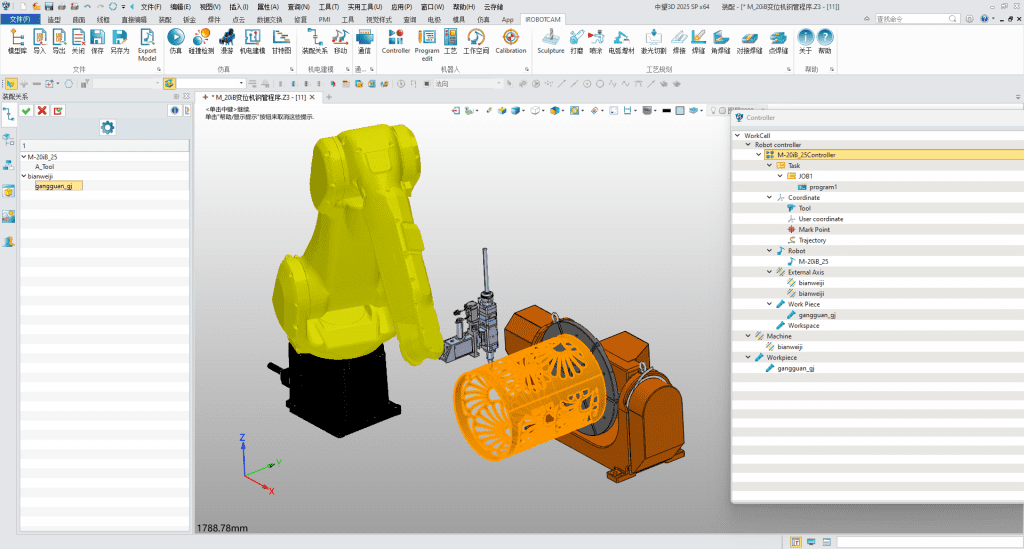
3. 利用iRobotCAM獨(dú)有的定位功能,針對(duì)激光的加工需求,可以快速的實(shí)現(xiàn)工件的精準(zhǔn)定位。更具體的講,iRobotCAM基于工件的CAD特征可以實(shí)現(xiàn)各種工況下的工件定位。
4. 利用iRobotCAM的軌跡生成能力,可以實(shí)現(xiàn)曲面多軸復(fù)雜軌跡的生成,實(shí)現(xiàn)包括7軸以上的機(jī)器人的激光工藝的應(yīng)用。
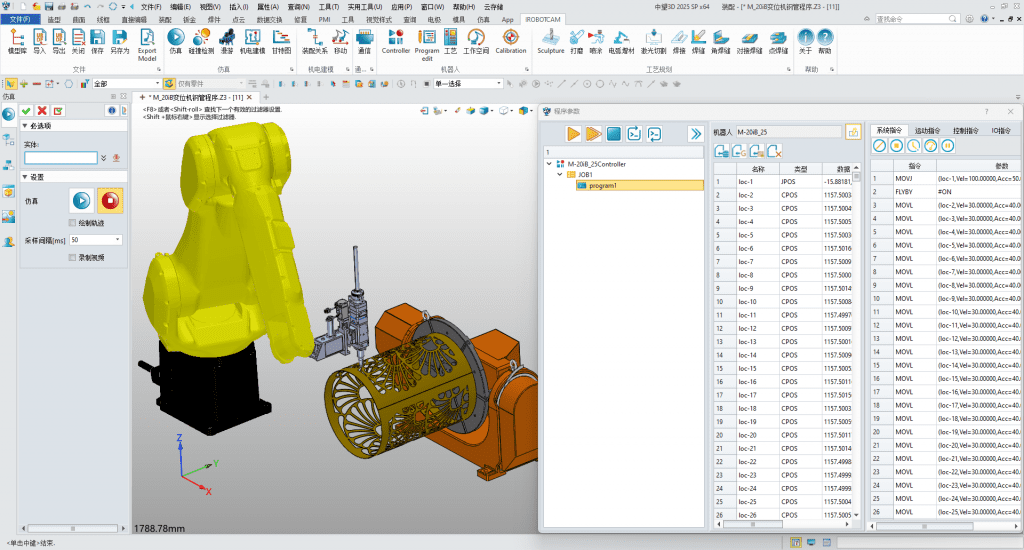
5. 利用iRobotCAM的機(jī)器人虛擬調(diào)試能力,可以實(shí)現(xiàn)機(jī)器人激光場(chǎng)景的編程與虛擬仿真,高效的查看機(jī)器人工藝的應(yīng)用效果
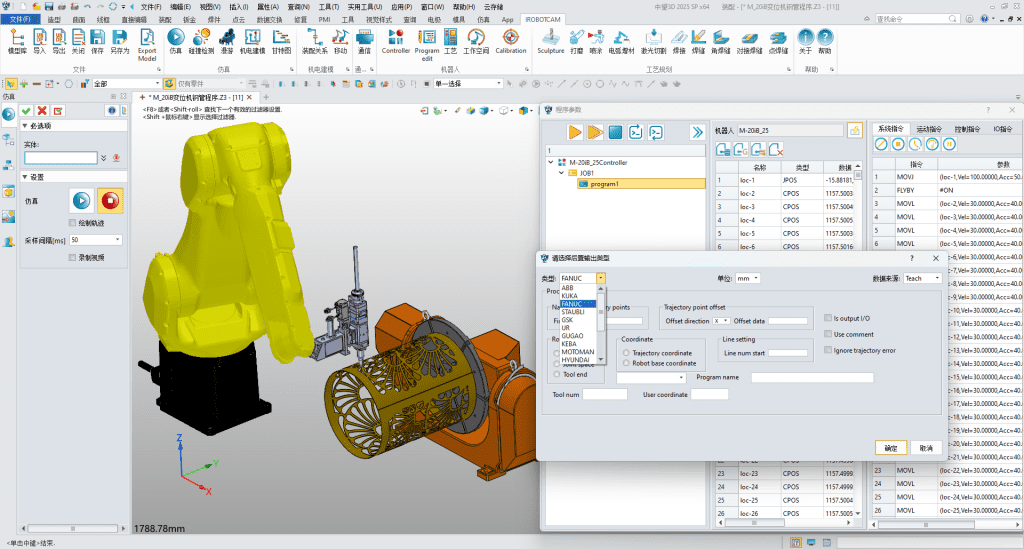
6. 利用iRobotCAM的后置處理能力,可以高效的適配包括發(fā)那科、ABB、安川、庫(kù)卡、 廣數(shù)、新時(shí)達(dá),埃斯頓、華數(shù),圖靈等各類機(jī)器人,高效的利用一套軟件管理多種品牌或多種設(shè)備。
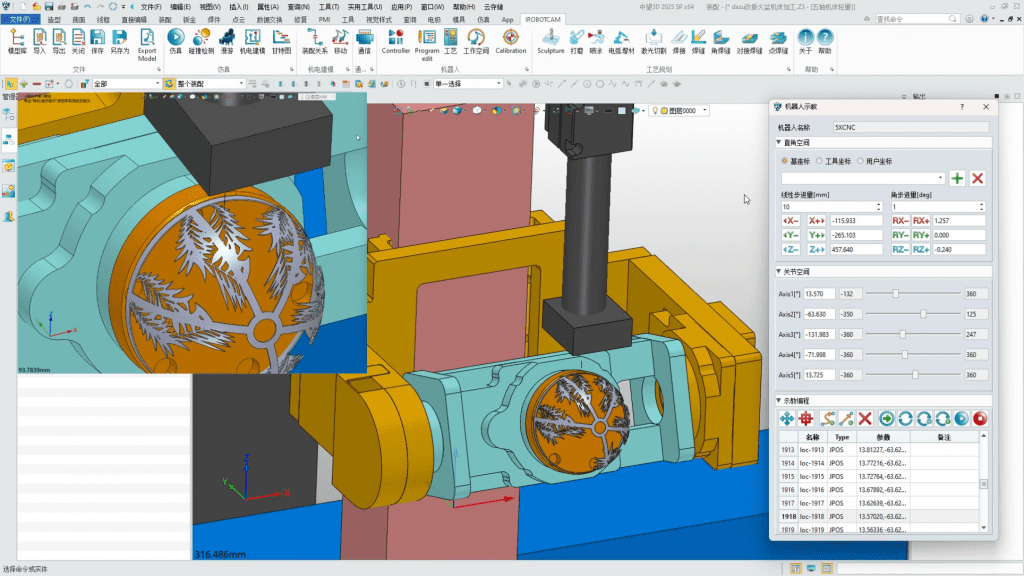
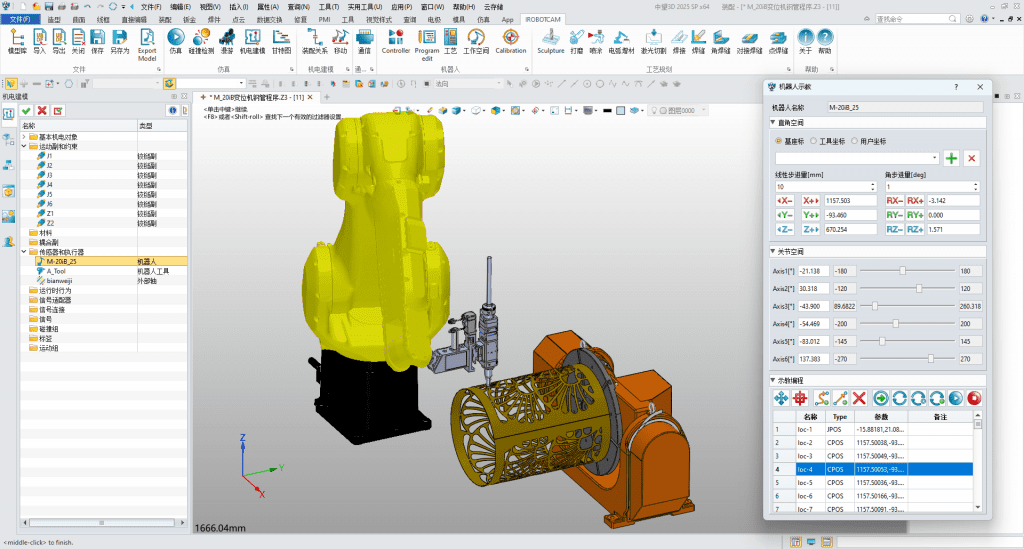
下面我們看一下iRobotCAM如何利用機(jī)器人實(shí)現(xiàn)5軸鏤空?qǐng)D案的加工,通過iRobotCAM靈活的編程能力,實(shí)現(xiàn)5軸軌跡的生成并實(shí)現(xiàn)機(jī)器人快速仿真。
五,總結(jié)
激光工藝的應(yīng)用,核心點(diǎn)就是精度,這需要編程與仿真具備高精度的架構(gòu)設(shè)計(jì),通過以上典型的5軸激光加工機(jī)床的應(yīng)用案例和機(jī)器人多軸激光加工的應(yīng)用場(chǎng)景,可以看出,選擇iRobotCAM作為激光加工與虛擬調(diào)試的解決方案,可以有效的解決激光加工的底層的高精度問題。而進(jìn)一步擴(kuò)展來看,作為激光加工的工藝應(yīng)用,iRobotCAM由于其技術(shù)架構(gòu)的開放性,可以進(jìn)一步擴(kuò)展其在更多包括激光切割,激光融覆,電弧增材制造應(yīng)用等場(chǎng)景并體現(xiàn)其明顯的高精度的技術(shù)優(yōu)勢(shì)。
聯(lián)絡(luò)我們,獲取更全面的激光加工工藝應(yīng)用白皮書.
關(guān)于越擎科技
越擎科技致力于打造開放的iRobotCAM機(jī)器人離線編程平臺(tái),是集產(chǎn)線機(jī)電概念設(shè)計(jì)以及機(jī)器人加工編程仿真,虛擬調(diào)試等一體的數(shù)字化解決方案.
iRobotCAM網(wǎng)站: www.euromedic-care.com,聯(lián)絡(luò)郵件: cooperation@iRobotCAM.com