概要:機器人激光的工藝主要在于高精度,而利用激光實現(xiàn)高精度的制造能力是航天,汽車,機械等各個行業(yè)實現(xiàn)高性能或高精度設(shè)備的基礎(chǔ),通過基于三維CAD平臺架構(gòu)的iRobotCAM,可以實現(xiàn)高精度的編程能力,從而實現(xiàn)高精度的機器人激光加工。
機器人激光的工藝主要在于高精度,而利用激光實現(xiàn)高精度的制造能力是航天,汽車,機械等各個行業(yè)實現(xiàn)高性能或高精度設(shè)備的基礎(chǔ),而作為機器人行業(yè)而言,激光工藝的應(yīng)用有何難點,如何快速的實現(xiàn)機器人激光工藝的應(yīng)用呢?
我們先了解一下機器人激光加工的一般流程:
導入機器人及工件> 實現(xiàn)軌跡編程> 工件的定位與機器人標定> 全場景的仿真> 代碼輸出及機器人加工
從以上流程可以看出,激光工藝的重點在于數(shù)字化環(huán)境的建立以及代碼的輸出與仿真, 我們以iRobotCAM離線編程軟件為例,闡述一下,如何利用iRobotCAM來實現(xiàn)機器人激光工藝的高效應(yīng)用。
- 利用iRobotCAM其基于國產(chǎn)三維CAD 中望3D內(nèi)核的能力,可以快速的建模完成設(shè)備及工藝的數(shù)字化

2. 利用iRobotCAM的機器庫,可以快速的建立涉及到激光應(yīng)用的相關(guān)的機器人或工具,避免未來重復的建立基本零件庫, 有助于企業(yè)高效的使用數(shù)字化模型

3. 利用iRobotCAM獨有的定位功能,針對激光的加工需求,可以快速的實現(xiàn)工件的精準定位。更具體的講,iRobotCAM基于工件的CAD特征可以實現(xiàn)各種工況下的工件定位。

4. 利用iRobotCAM的軌跡生成能力,可以實現(xiàn)5軸軌跡的生成,實現(xiàn)包括7軸以上的機器人的激光工藝的應(yīng)用。

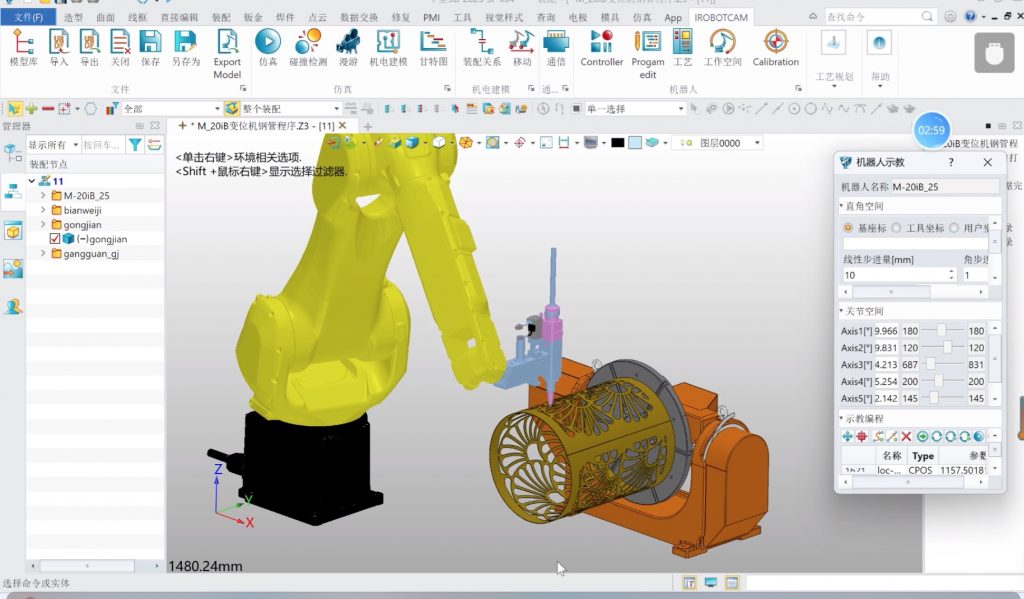
5. 利用iRobotCAM的機器人虛擬調(diào)試能力,可以實現(xiàn)機器人激光場景的編程與虛擬仿真,高效的查看機器人工藝的應(yīng)用效果

6. 利用iRobotCAM的后置處理能力,可以高效的適配包括發(fā)那科,安川,Kuka, 松下,廣數(shù),華數(shù),圖靈等各類機器人,高效的利用一套軟件管理多種品牌或多種設(shè)備。

下面我們看一下iRobotCAM如何利用機器人實現(xiàn)5軸鏤空圖案的加工,通過iRobotCAM靈活的編程能力,實現(xiàn)5軸軌跡的生成并實現(xiàn)機器人快速仿真。
聯(lián)絡(luò)我們,獲得更多機器人應(yīng)用案例
關(guān)于越擎科技:
越擎科技致力于打造開放的iRobotCAM機器人離線編程平臺,是集產(chǎn)線機電概念設(shè)計以及機器人加工編程仿真,虛擬調(diào)試等一體的數(shù)字化解決方案.
iRobotCAM網(wǎng)站: www.euromedic-care.com,聯(lián)絡(luò)郵件: cooperation@iRobotCAM.com